PID型模糊神经网络控制器设计与学习算法
需积分: 10 5 浏览量
更新于2024-09-12
收藏 172KB PDF 举报
"本文介绍了一种PID型模糊神经网络控制器的设计方法,该控制器结合了PID控制与模糊逻辑和神经网络的特性,具有在线学习能力。通过添加自回归神经元的五层模糊神经网络结构,实现了参数的动态调整。文中还提出了权值修正算法,并根据梯度下降法给出了权值学习速率的收敛准则。"
正文:
在自动化控制领域,PID(比例-积分-微分)控制器因其简单、稳定和高效而被广泛应用。然而,传统的固定参数PID控制器在面对复杂的非线性系统时可能会表现出不足。为了解决这一问题,研究人员开始探索将PID控制与神经网络和模糊逻辑相结合的方法,以增强控制器的适应性和自学习能力。
本文提出的“一种PID型模糊神经网络控制器”就是这种结合的产物。该控制器采用五层模糊神经网络架构,其中包含一个自回归神经元。自回归神经元的引入使得网络能够对历史输入信息进行记忆,从而更好地捕捉系统的动态行为。五层网络结构通常包括输入层、模糊化层、规则推理层、反模糊化层和输出层,每一层都对应着模糊逻辑系统中的不同步骤。
模糊逻辑在这里的作用是提供一种处理不确定性和非线性问题的方法,通过模糊规则库来模拟人类专家的经验知识。而神经网络则负责学习和优化这些模糊规则的权重,使其能根据系统状态实时调整。论文中提出的权值修正算法基于梯度下降法,这是一种常见的优化算法,用于最小化网络的误差函数,进而调整网络的参数。
在反馈控制系统中,这种PID型模糊神经网络控制器可以作为一个自学习单元,不断调整其参数以适应系统的变化。文中还给出了关于网络各层权值学习速率的收敛定理,证明了这种学习过程的稳定性。这为控制器在实际应用中提供了理论保证,确保其能够在各种工况下保持良好的控制性能。
总结来说,该研究创新地融合了PID控制、模糊逻辑和神经网络的优势,设计出一种能够在线学习和适应复杂系统的控制器。这种方法对于提升控制系统的智能水平和应对不确定性环境的能力具有重要意义,为未来自动化控制领域的研究和发展提供了新的思路和实践基础。
Vol. 15 No. 3
系
统
仿
真
学
报
March 2003 JOURNAL OF SYSTEM SIMULATION
· 389
·
一种
PID
型模糊神经网络控制器
王印松
1
,刘武林
2
(
1
华北电力大学动力工程系,保定 071003;
2
湖南省电力试验研究所,长沙 410000)
摘
要:
为了使一种基于两维控制规则基的 PID 型模糊控制器具有参数在线学习功能,提出了一
种包含一个自回归神经元的五层模糊神经网络,并根据梯度下降法,给出了它各层权值的修正算法,
该网络可以在反馈控制系统中作为一个自学习控制器来使用。最后,根据有关定理,给出并证明了
该网络各层权值学习速率的收敛准则。
关键词:
模糊逻辑;神经网络;模糊神经网络;学习速率;PID 控制
文章编号:
1004-731X (2003) 03-0389-04
中图分类号:
TP183
文献标识码:
A
A Kind of PID-Typed Fuzzy Neural Network Controller
WANG Yin-song
1
,Liu Wu-lin
2
(
1
Department of Power Engineering, North China Electric Power University, Baoding 071003, China;
2
Hunan Electric Power Test & Research Institute, Changsha 410000, China)
Abstract: In order to realize the self-learning ability of a kind of PID-typed fuzzy controller designed only using
two-dimension rule base, we design a five-layer fuzzy neural network which contains a self-recurrent neuron and propose
the weights correcting method of all its layers on the gradient descent algorithm. This network can be used as a
self-learning controller in the feedback control system. It is also given and proved the convergent theorem of the weights
learning rate in the network based on the relative theorem.
Keywords: fuzzy logic; neural networks; fuzzy neural networks; learning rate; PID control.
引
言
1
大量的文献资料详细地研究了模糊逻辑和神经网络相
结合的特点。模糊神经网络的优点主要有:(1)它能自动识别
模糊逻辑规则、整定隶属度函数和相关参数;(2)与普通的神
经网络不同,模糊逻辑神经网络中的各个参数都具有明确的
物理意义。利用神经网络的学习能力,模糊系统可以成功的
构造各种各样的输入、输出影射关系。
为于实现文献[1]给出的模糊逻辑推理系统,在本文中,
提出了一种特殊类型的 PID 型模糊神经网络。它是一个五层
的前馈型神经网络,可以作为控制系统的一个参数自修正控
制器;它的每层及每层中的各个神经元都有明确的物理意
义,各层的初始权值可根据对应的模糊控制器来唯一的确
定,克服了神经网络权值随机选取的缺点。应用文献[2]中的
有关定理,给出并证明了各层权值学习率的收敛准则。
1 PID
型模糊神经网络
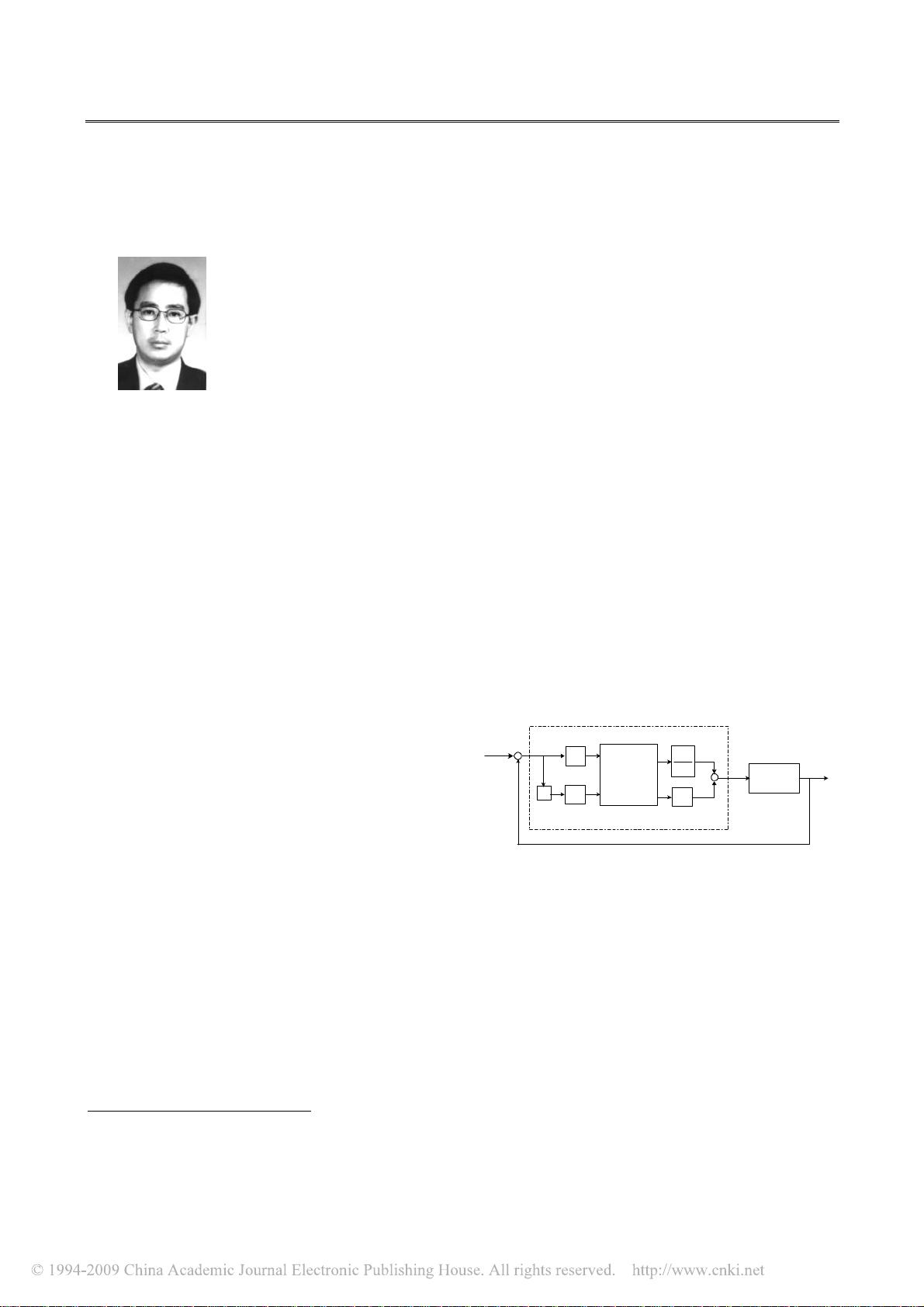
文献[1]提出了一种只用偏差 )(te 和偏差变化率 )(tde 作
为控制器输入的 PID 型模糊控制器,其结构如图 1 所示。这
种设计方法即在控制器中引入微分和积分作用,又没有增加
收稿日期:
2002-05-21
修回日期:
2002-08-07
基金项目:
华北电力大学博士学位基金资助(2000BJ0005)
作者简介:王印松
(1967-), 男, 河北河间人, 博士, 副教授, 研究方向为
智能控制理论、非线性系统分析与控制;
刘武林
(1966-), 男, 湖南人, 高
工, 研究方向为高等过程控制技术。
控制规则基的设计维数,是一种可行的模糊控制器设计方法。
对于图 1 所描述的双输入单输出模糊控制器,它的输出
可表示为:
1f
K
s
K
f 3
模糊推理
系统
u
y
e
d
y
+
-
对象
+
+
PID型模糊控制器
'e
2f
Kde
4f
K
图 1 PID 型模糊控制器结构图
∫
′
=
t
tedtteteFtu ))(,)(),(()(
(1)
它等效于一个参数时变的 PID 控制器,并且有:
3241 ffffp
KKKKK βα +=
(2)
31 ffi
KKK α=
(3)
42 ffd
KKK β=
(4)
式中,
βα
,
为等效系数,
dip
KKK ,,
分别为 PID 控制器的
比例、积分和微分参数。
1.1
模糊神经网络
(FNN)
的构成
参照图 1 所示的 PID 型模糊控制器,构造相应模糊神
经网络,结构如图 2 所示,它由五层前向神经网络构成。
第一层:输入层。该层中的每个神经元表示一个输入变
量,神经元个数等于模糊规则前提中出现的变量个数。该层
神经元直接把输入变量
i
x
的值通过作用函数
F
,传递给下
下载后可阅读完整内容,剩余3页未读,立即下载
147 浏览量
2021-09-20 上传
2011-12-13 上传
2021-10-03 上传
2022-07-14 上传
2013-12-02 上传
2021-09-26 上传
2021-09-27 上传
2021-09-27 上传

menhkilantian
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
