仿人双足机器人机构设计与运动分析
版权申诉
"这篇文档是关于仿人双足机器人机构设计的研究,主要涵盖了该领域的历史、设计过程以及运动模拟和强度分析。"
在机器人技术的众多分支中,仿人双足机器人占据着至关重要的地位,它集合了多学科的知识,如机械工程、控制理论、传感器技术等,代表着一个国家的科技实力。仿人双足机器人因其能够实现类似人类的双足行走,具备高度的灵活性和适应性,能够在复杂环境中执行任务,尤其适合于执行人类难以或不宜进行的危险作业。
文档首先回顾了国内外仿人双足机器人的发展历程。从早期的基础概念到现代的高级应用,这一领域经历了从简单的步行机制到复杂的动态平衡控制的演进。随着技术的进步,人们对双足机器人的步态控制、稳定性、能量效率等方面的研究日益深入。
接着,设计过程的重点在于分析人类下肢的生物力学特性。通过对人体下肢关节的结构和运动方式的研究,确定了机器人的自由度配置,即机器人的各个关节应如何设置以模仿人类的腿部动作。此外,还需要选择合适的关节结构,例如铰接式、旋转式或者连杆式,并决定采用何种驱动方式,如电动、液压或气压驱动,以满足机器人行走所需的力矩和速度。
接下来,设计者在Inventor这样的三维建模软件中构建机器人的机构模型,并进行组件装配。这个阶段涉及到精确的几何尺寸计算和力学分析,确保各部件的相互配合和运动的准确性。通过计算机辅助设计(CAD),可以直观地查看和修改设计,提高效率。
最后,文档强调了运动模拟和强度分析的重要性。利用仿真软件,可以模拟机器人的行走过程,检查其步态的稳定性和动态性能。同时,强度分析评估了机器人机构在负载下的承载能力和耐久性,确保其在实际操作中不会因过大的应力而损坏。这些分析结果为进一步优化机构设计提供了依据,比如调整材料选择、增加支撑结构或是改进驱动系统。
这篇文档详尽地探讨了仿人双足机器人机构设计的各个方面,包括历史背景、设计原理、建模方法和性能验证,为后续的机器人研发工作提供了宝贵的理论和技术参考。
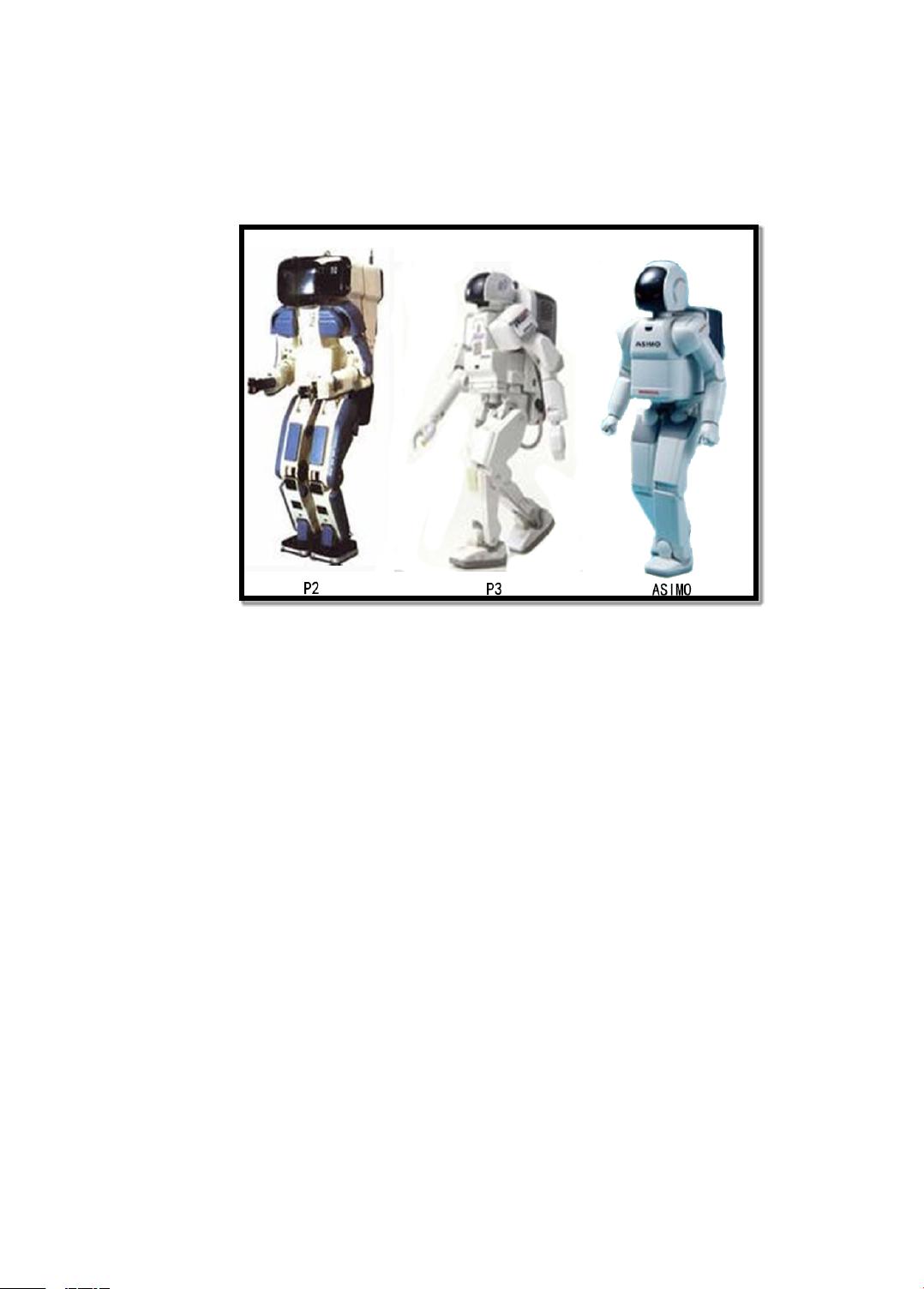
图 1.4 本田系列机器人
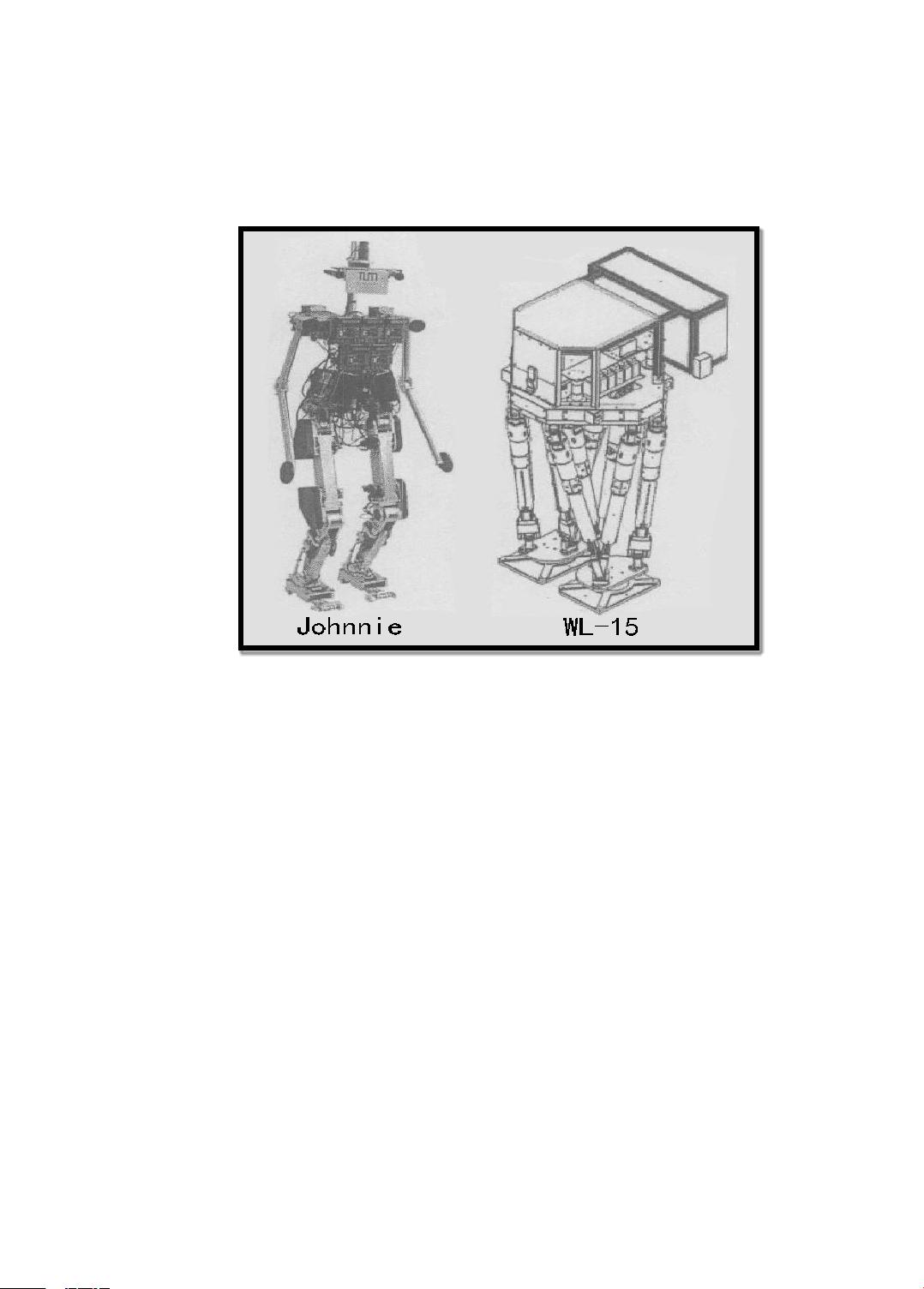
早稻田大学机械工程系研制出的双腿行走机械装置 WL-15 采用完全
并联的腿部结构,如图 1.5 所示,腿部由三套并联的双缸机构组成,足
部由骨盆的六个缸体汇聚而成。相比传统的双足机器人腿部机构来说,
它的执行元件承受的负载要更小,相对负载能力更强。但是由于 WL-15
没有膝关节,因此无法完全模拟人类的行走步态。德国慕尼黑技术大学
应用力学实验室研制出的 Johnnie 双足机器人,如图 1.5 所示,高 1.8m,
重 40kg,两条腿共 12 个自由度,通过直流电机来配合轻质齿轮减速器实
现驱动
[9][10]
。
剩余57页未读,继续阅读
2021-06-30 上传
2023-02-23 上传
2023-07-12 上传
2021-09-28 上传
2024-01-24 上传
2022-11-24 上传
2023-02-16 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
