ROS机器人URDF建模教程:从基础到实践
本教程深入介绍了在ROS(Robot Operating System)中进行机器人建模使用的统一机器人描述格式(URDF)。URDF是用于描述机器人的通用XML格式,它提供了关于机器人结构、动力学和外观的详细信息,包括关节、链接、传输以及几何形状等元素。URDF的核心概念包括:
1. **概念与基本使用**:
- URDF是统一的机器人描述格式,用于定义机器人的静态和动态特性,如几何外形、关节连接、运动学结构。
- 该格式采用XML,允许用一系列标签来表示不同的组件,如`link`、`joint`和`transmission`。
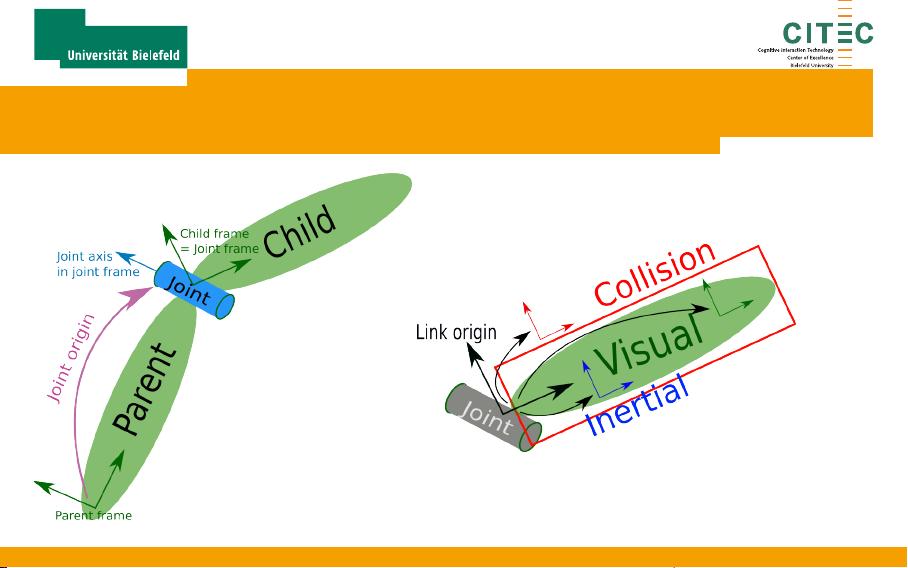
- 关节描述了连接两个链接的运动关系,包括固定轴旋转 (`rpy`)。
2. **链接和关节表示**:
- 在URDF中,链接被表示为具有单一参考框架的实体,通过`<link>`标签定义,可以包含视觉描述 `<visual>`,其中可能包含几何形状(如盒子、圆柱体或球体),或者外部资源(如STL或DAE格式的几何模型)。
- 关节的定义包括其名称、连接的链接、运动类型(如旋转、平移)以及初始位置和姿态。
3. **高级使用**:
- URDF的高级功能可能涉及更复杂的结构,如嵌套链接、子装配(通过Xacro扩展)以及对物理特性的进一步描述,如质量分布、摩擦系数和惯性矩阵。
4. **实践案例**:
- 课程提供了一个实际案例,演示如何应用这些概念在ROS环境中构建和操作机器人模型。这可能包括创建和加载URDF文件、使用rviz工具进行可视化以及在仿真或实际任务中的应用。
学习本教程,读者将能够掌握如何在ROS中使用URDF进行机器人建模,从而更好地理解和管理复杂机器人系统。理解URDF语法并熟悉其在ROS中的实际应用对于任何从事机器人开发或与ROS集成的工程师来说都是至关重要的。

剩余25页未读,继续阅读
142 浏览量
692 浏览量
432 浏览量
597 浏览量
190 浏览量
255 浏览量
652 浏览量
355 浏览量
357 浏览量

fdtsaid
- 粉丝: 297
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
