CarSim与Simulink联合仿真的步骤详解
需积分: 50 153 浏览量
更新于2024-09-10
收藏 570KB PDF 举报
在汽车工程领域,CarSim是一款广泛使用的车辆动力学模拟软件,它与Matlab的Simulink集成,为复杂车辆控制系统的设计和验证提供了强大的工具。本文将详细介绍如何利用CarSim与Simulink进行联合仿真,以便于开发和优化车辆控制策略。
首先,要进行CarSim与Simulink的联合仿真,你需要在Simulink中创建一个新的模型,然后将其保存以便后续链接到CarSim。由于CarSim本身并不支持新模型的创建,因此这一步骤在CarSim环境中完成。在Simulink中,你需要设置好各个模块和信号的连接,确保它们能够正确传递数据。
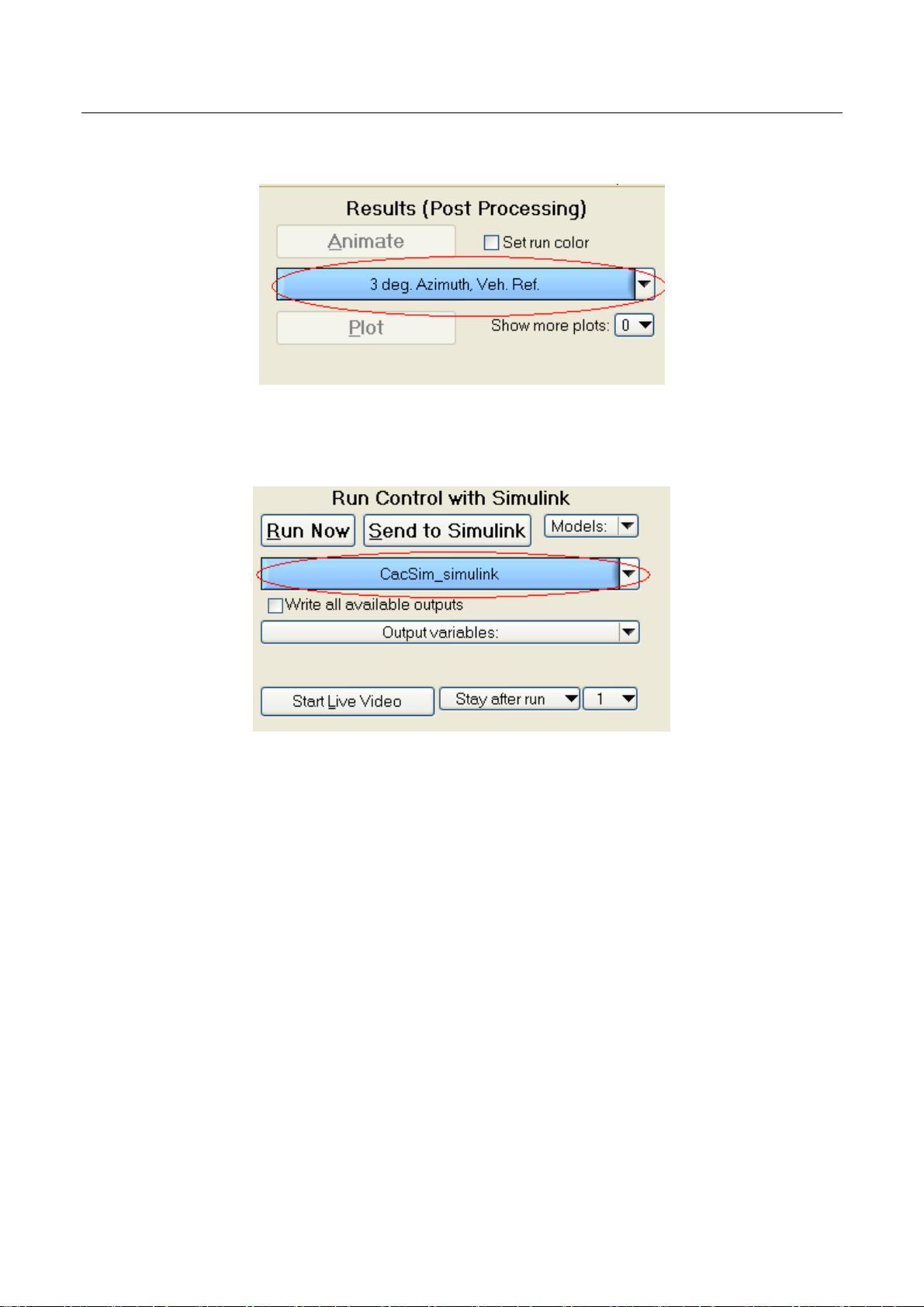
一旦Simulink模型准备好,接下来在CarSim中操作。选择“Link to New Dataset”,为即将导入的模型指定一个名称,这样可以清晰地标识出模型与Simulink之间的关联。选择合适的观察视角,以便观察仿真结果。在CarSim中,你可以设置不同的输入参数,如本例中的按键“Refresh”用于更新ActiveImportVariables,以及“View Spreadsheet”键用于查看和调整输入变量。
在输入参数方面,本文以三个参数为例进行讲解:Openloop throttle control(开环油门控制)、Steering wheel angle(方向盘角度)和Brake pedal force(刹车踏板力),通常选择Replace模式来影响仿真过程。每个参数的设置都至关重要,因为它们直接影响车辆的动态响应。
输出参数的选择同样关键,这里选择了四个输出参数:Longitudinal speed(纵向速度)、Angular rate(角速度)。这些输出数据可以帮助你评估车辆的性能,例如加速能力、转向响应等,以便对控制算法进行优化。
在完成模型设置后,记得保存所有更改,以便在后续的仿真过程中复用。通过这种联合仿真,工程师可以在安全的虚拟环境中测试和迭代控制策略,降低了实际试验的风险,提高了设计效率。
总结来说,CarSim与Simulink的联合仿真是一种有效的系统级验证方法,它结合了Simulink的模型构建和CarSim的车辆动力学模拟,使得汽车控制系统设计者能够快速评估和优化他们的控制策略。通过掌握这个流程,工程师们能够在理论分析与实践应用之间建立紧密的联系,提升整个车辆工程项目的质量和效率。
Copyright © 2011 Vehicle Controls and Intelligence Lab, Jilin University
All rights reserved
3
5.选择观察视角(根据自己需要)
6.进入上述所创建的模型,设置参数
剩余10页未读,继续阅读
112 浏览量
228 浏览量
335 浏览量
473 浏览量
2025-02-06 上传
2024-11-04 上传

HeSiney
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
