Linux下ARM与单片机串口通信详解:s3c2440与C8051Fxxx连接与驱动
56 浏览量
更新于2024-09-03
1
收藏 205KB PDF 举报
本篇文章主要探讨了在Linux环境下基于ARM9微处理器S3C2440与C8051Fxxx系列单片机的串口通信设计。首先,文章从硬件连接角度出发,强调了两者的供电电压匹配,使得无需进行电平转换,采用了标准的TXD、RXD和GND三线连接方式,且需注意采用交叉连接方式。
在Linux系统中,串口通信设计被简化为设备操作,利用了Linux提供的串口设备描述功能。S3C2440上的Linux2.6.32操作系统已经集成了串口驱动程序,通过文件操作接口将串口操作转化为文件操作,如设备文件"/dev/ttySAC1"就代表串口1。串口通信的关键在于设置参数,这涉及到Linux中的termios结构,它定义了一系列控制串口特性的标志位,如波特率、数据位、停止位和控制特性等。
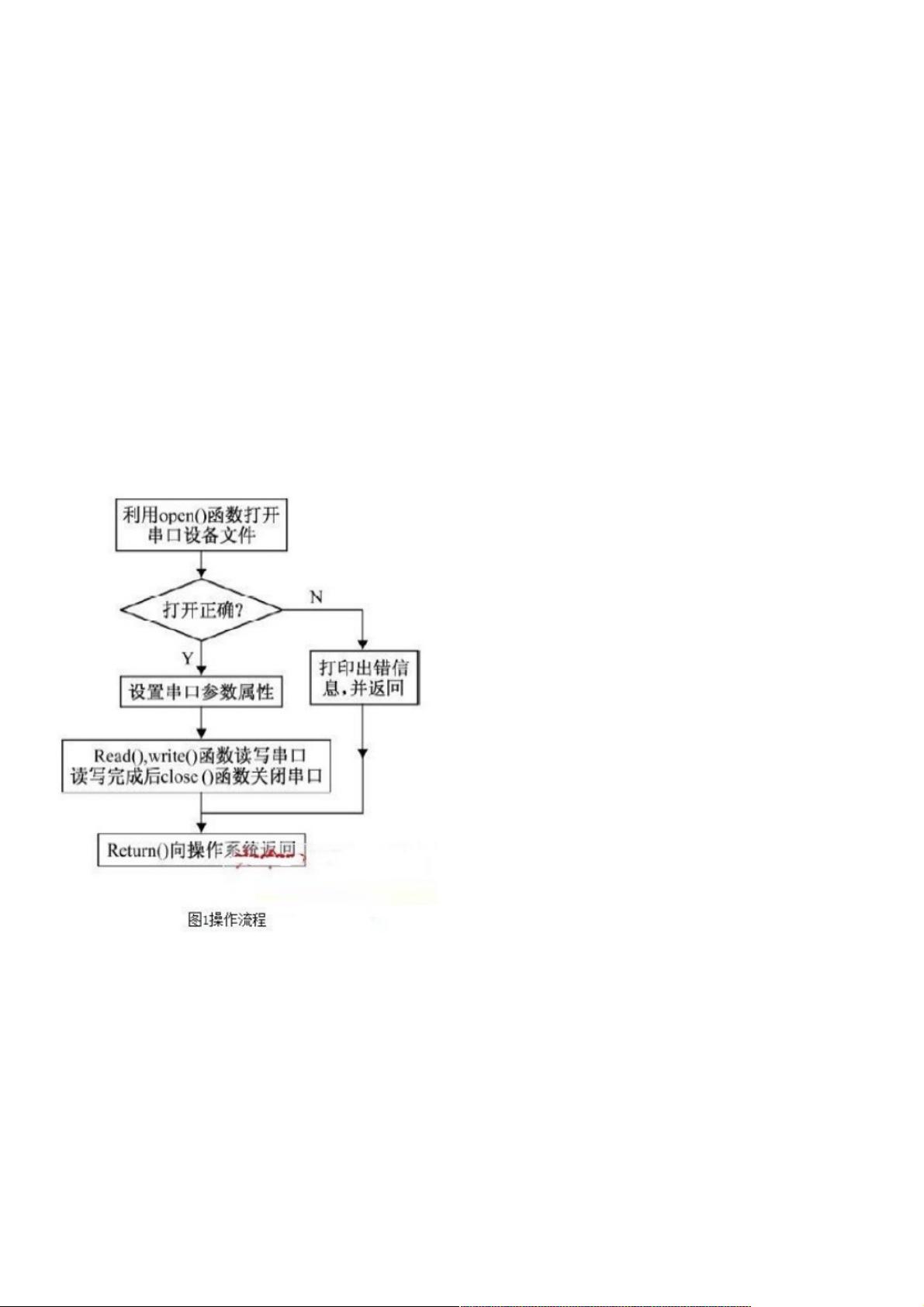
文章详细描述了串口通信的编程流程,包括:
1. 打开串口:通过`open()`函数打开设备文件"/dev/ttySAC1",以读写模式(O_RDWR)进行,如果成功则返回文件描述符,失败则返回-1。
2. 设置串口属性:使用`tcsetattr()`函数来设置串口的参数,这涉及到了`struct termios`中的各种标志,如`tciflag`、`tcoflag`、`tccflag`和`tlflag`,以及控制特性数组`tc_cc`。
3. 读写数据:完成上述设置后,可以通过常规的I/O操作(如`read()`和`write()`)进行数据传输。
4. 关闭串口:通信结束后,使用`close()`函数关闭已打开的文件描述符,释放系统资源。
整个过程展示了在Linux环境中如何有效地管理和控制串口通信,这对于嵌入式系统开发和设备间的通信至关重要。无论是嵌入式系统工程师还是Linux平台的开发者,理解并掌握这种串口通信设计方法,对于构建稳定、高效的系统架构具有实际应用价值。
基于基于Linux的的ARM/单片机串口通信设计单片机串口通信设计
绍Linux 环境下串口通信的设计方法和步骤,并介绍了ARM9 微处理器s3c2440 在Linux 下和C8051Fxxx 系列单
片机进行串行通信的设计方法,给出了硬件连接和通信程序流程图。
1硬件连接
s3c2440是三星公司生产的基于ARM9核的处理器,采用3.3V电压供电;C8051Fxxx系列单片机是美国CYGNAL公司推出的与
8051兼容的高性能高速单片机,采用3.3V电压供电。两者供电电压相同,所以进行串行口通信时不需要进行电平转换。硬件
连接采用最常用的TXD,RXD,GND三线连接方式。注意采用交叉连接方式。
2Linux下串口通信
2.1Linux下串口设备描述
s3c2440上移植了Linux2.6.32操作系统,加载了s3c2440的串口驱动程序,通过Linux提供的串口操作函数和文件操作函数把
对串口的操作等同于文件操作,降低了串口的操作难度,提高了效率。在程序中设备和文件都是通过文件描述符来操作的,文
件描述符在Linux内核中是一个非负整数。Linux设备文件都存放在“/dev”目录下,串口也不例外,在/dev中可以找到串口对应
的设备文件,本文对应的串口1的设备文件路径是“/dev/ttySAC1”。
2.2Linux下串口通信程序设计
串口通信需要设置一些参数,如波特率、数据位、停止位,输入输出方式等。这些参数都存在于Linux提供的termios结构中,
该结构是Linux系统用于查询和操作各个终端的一个标准接口,定义在头文件《ter-mios.h》中,如下所示:
STructtermios{
tcflag_tc_iflag;/*输入标志*/
tcflag_tc_oflag;/*输出标志*/
tcflag_tc_cflag/*控制标志*/
tcflag_tc_lflag/*本地标志*/
cc_tc_cc[NCCS];/*控制特性*/
};
Linux串口通信步骤可分为以下三步:
第一步:打开串口
调用open()函数打开串口设备文件,若出错则返回-1,成功则返回文件句柄。
下载后可阅读完整内容,剩余3页未读,立即下载
254 浏览量
193 浏览量
104 浏览量
2020-10-18 上传
2021-09-06 上传
106 浏览量









