安川MotoSim EG-VRC宏命令详解:从创建到应用
需积分: 9 122 浏览量
更新于2024-07-15
1
收藏 867KB PPTX 举报
VRC-宏命令是在安川仿真MotoSim EG环境中的一种高级编程工具,它允许用户自动化复杂的任务并增强程序的灵活性。以下是VRC-宏命令在MotoSim EG中的详细使用步骤:
1. **添加机器人与进入维护模式**:
首先,用户需在仿真环境中通过维护模式来访问宏命令功能。这通常涉及进入机器人设置或管理界面,选择相应的选项进入宏命令编辑模式。
2. **创建宏程序**:
- 程序类型:选择“宏程序”作为程序类型,用于编写预定义的动作序列。
- 创建过程:在MotoSim EG中,用户可以通过特定菜单或工具创建新的宏程序,并设置其基本结构。
3. **修改示教条件等级**:
宏命令支持扩展模式,允许更复杂的逻辑控制。在创建宏程序后,需要配置示教条件等级以确保程序按照预期执行。
4. **设置局部变量**:
在宏程序中,局部变量(L开头)用于临时存储数据。用户需设置适当的变量个数(如10个),并在DISPLAY的JOBHEADER中进行配置。
5. **宏程序中的赋值与运算**:
- ARITH命令:这个命令用于在宏程序内部进行算术运算,如SET用于复制外部变量至局部变量,加法运算(如LB000+LB001)则使用ARITH中的相应功能。
- 变量类型选择:确保正确选择变量类型以执行所需的操作。
6. **宏程序关联与参数传递**:
- SETUP中的MARCOINST:用户选择新建的宏程序,通过空格键关联到需要调用它的其他程序(如MACRO1)。
- GETARG和ARG.1:在宏命令关联过程中,ARG.1代表宏程序的输入参数,GETARG用于接收这些参数,并将其映射到程序内部变量。
7. **宏命令的使用与变量表达式设置**:
在普通程序中,通过MACRO调用宏程序33,如给变量B001和B002赋值并执行加法运算,结果存放在B003中。使用DISPLAY的ON EXPRESSION功能可以设置变量名和表达式。
8. **实际应用示例**:
VRC-宏命令广泛应用于实际场景,比如获取机器人当前的位置数据,进行坐标变换或计算,然后利用这些计算结果来指导机器人的动作,提高了工作效率和程序的可重用性。
总结,VRC-宏命令是安川仿真MotoSim EG中强大的编程工具,它通过预定义的命令和灵活的变量管理,使得程序设计更加高效和精确,适用于各种工业机器人模拟和控制系统。掌握和熟练运用VRC-宏命令,对于提升机器人仿真和实际操作的自动化程度至关重要。
4
VRC- 宏命令
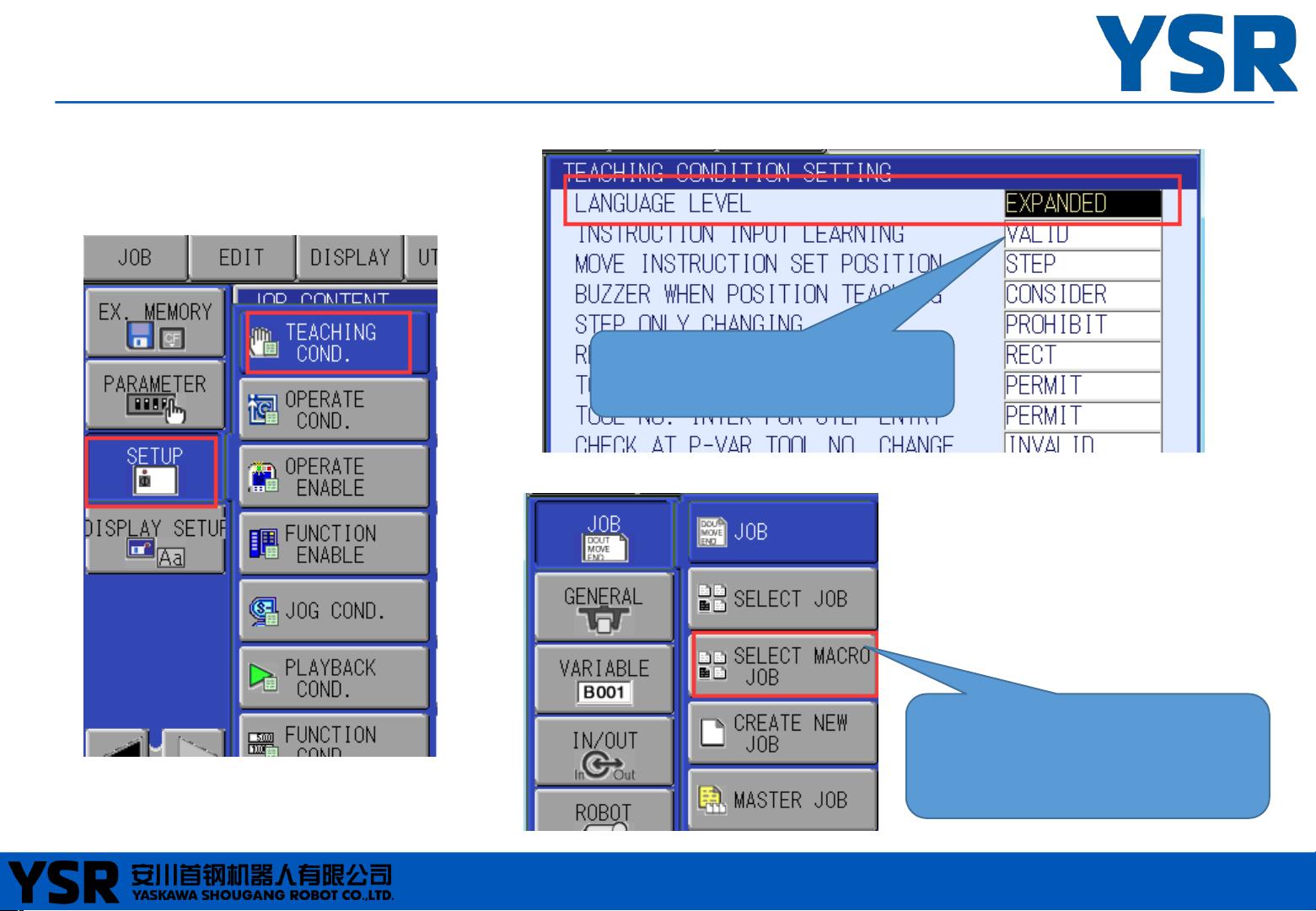
4 、修改示教条件等级
此处选扩展
扩展设置好之后选择之
前创建的宏程序
剩余15页未读,继续阅读
283 浏览量
258 浏览量
点击了解资源详情
2021-09-22 上传
713 浏览量
2008-01-28 上传
199 浏览量
7148 浏览量









