2015年IEEE Transactions on Image Processing论文:视觉显著对象检测基准研究
需积分: 9 166 浏览量
更新于2024-07-15
收藏 12.69MB PDF 举报
本文《显著对象检测:一个基准》发表在2015年1月的IEEE Transactions on Image Processing上,由阿里·博里、明ming-明成、华如柱和佳利四位作者合作完成。该研究是视觉注意力领域的一个重要里程碑,旨在通过评估和比较40个最先进的显著对象检测算法,为计算机视觉任务提供可靠的关键区域检测方法,这些任务包括图像分割、物体识别和自适应压缩。
文章的核心关注点在于提出一种基于区域对比度的显著对象检测基准,这是一种旨在衡量算法在识别图像中最具视觉吸引力或突出部分(salient objects)的能力。作者们对这些算法进行了详尽的定量和定性分析,以便确定它们在处理复杂场景和不同视觉特性(如大小、形状、纹理等)时的表现。
研究中的关键贡献包括:
1. **方法评估**:通过对大量实验数据的分析,论文提供了对于各算法在处理各类场景(如自然场景、人造场景、静止图像和视频序列)下的性能评估指标,比如平均精度(mean average precision, mAP)、F-measure和AUC值等。
2. **基准设计**:设计了一个全面的评估框架,包括标准测试集和评估流程,使得研究人员可以方便地比较他们的算法与已有的方法,并推动领域内的技术进步。
3. **挑战与讨论**:文章还探讨了当前显著对象检测领域的挑战,例如光照变化、遮挡和复杂背景的影响,以及如何提高算法鲁棒性和效率。
4. **作者背景**:阿里·博里、明ming-明成来自学术界的重要机构,他们在图像增强和相关项目上也有所贡献,显示了他们在这个领域的深厚研究背景和影响力。
5. **后续影响**:这篇论文被引用次数超过600次,表明其在显著对象检测领域的广泛认可和研究价值,同时也促进了其他相关项目的进展,如ImageEnhancement。
《SalientObjectDetection: A Benchmark》是一篇深入研究和比较显著对象检测技术的重要论文,为后续研究者提供了一个清晰的评估标准,有助于推动计算机视觉领域的发展。如果你需要进行显著对象检测相关的项目或者研究,这篇文章将为你提供宝贵的参考资源和比较依据。
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. XXX, NO. XXX, XXXXX 2014 3
(a) MSRA10K (b) ECSSD (c) THUR15K
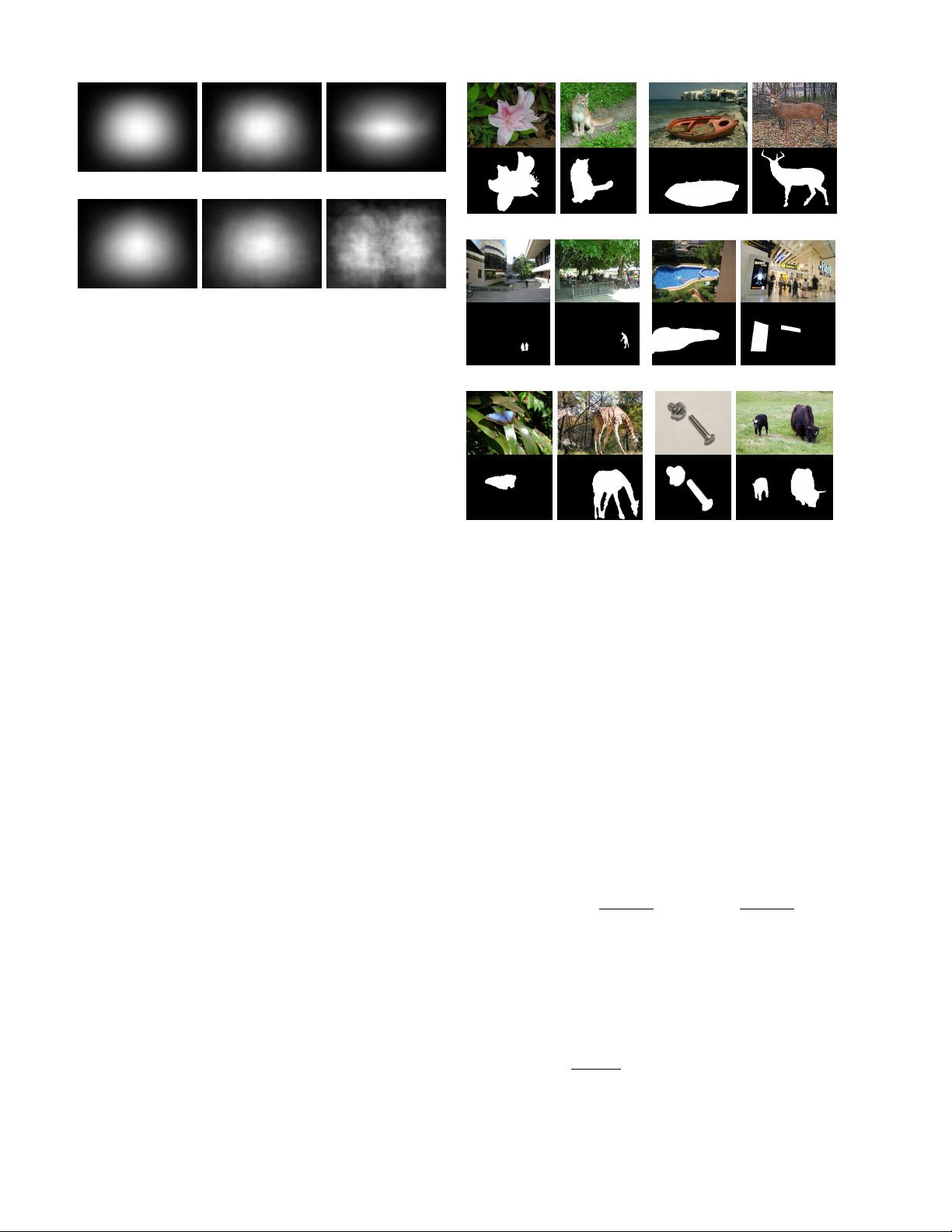
(d) DUT-OMRON (e) JuddDB (f) SED2
Fig. 2. Average annotation maps of six datasets used in benchmarking.
images in SED2 usually have two objects aligned around
opposite image borders. Moreover, we can see that the
spatial distribution of salient objects in JuddDB has a larger
variety than other datasets, indicating that this dataset have
smaller positional bias (i.e., center-bias of salient objects
and border-bias of background regions).
In Fig. 4(b), we aim to show the complexity of images
in six benchmark datasets. Toward this end, we apply the
segmentation algorithm by Felzenszwalb et al. [101] to see
how many super-pixels (i.e., homogeneous regions) can be
obtained on average from salient objects and background
regions of each image, respectively. In this manner, we can
use this measure to reflect how challenging a benchmark
is since massive super-pixels often indicate complex fore-
ground objects and cluttered background. From Fig. 4(c),
we can see that JuddDB is the most challenging benchmark
since it has an average number of 493 super-pixels from the
background of each image. On the contrary, SED2 contains
fewer number of super-pixels in foreground and background
regions, indicating that images in this benchmark often
contain uniform regions and are easy to process.
In Fig. 4(c), we demonstrate the average object sizes
of these benchmarks, while the size of each object is
normalized by the size of the corresponding image. We
can see that MSRA10K and ECCSD datasets have larger
objects while SED2 has smaller ones. In particular, we
can see that some benchmarks contain a limited number
of image regions with large foreground objects. By jointly
considering the center-bias property, it becomes very easy
to achieve a high precision on these images.
C. Evaluation Measures
There are several ways to measure the agreement be-
tween model predictions and human annotations [21]. Some
metrics evaluate the overlap between a tagged region while
others try to assess the accuracy of drawn shapes with
object boundary. In addition, some metrics have tried to
consider both boundary and shape [102].
Here, we use three universally-agreed, standard, and
easy-to-understand measures for evaluating a salient object
detection model. The first two evaluation metrics are based
on the overlapping area between subjective annotation and
(a) MSRA10K (b) ECSSD
(c) JuddDB (d) DUT-OMRON
(e) THUR15K (f) SED2
Fig. 3. Images and pixel-level annotations from six salient object datasets.
saliency prediction, including the precision-recall (PR) and
the receiver operating characteristics (ROC). From these
two metrics, we also report the F-Measure, which jointly
considers recall and precision, and AUC, which is the area
under the ROC curve. Moreover, we also use the third
measure which directly computes the mean absolute error
(MAE) between the estimated saliency map and ground-
truth annotation. For the sake of simplification, we use S to
represent the predicted saliency map normalized to [0, 255]
and G to represent the ground-truth binary mask of salient
objects. For a binary mask, we use | · | to represent the
number of non-zero entries in the mask.
Precision-recall (PR). For a saliency map S, we can
convert it to a binary mask M and compute P recision
and Recall by comparing M with ground-truth G:
P recision =
|M ∩ G|
|M|
, Recall =
|M ∩ G|
|G|
(1)
From this definition, we can see that the binarization
of S is the key step in the evaluation. Usually, there are
three popular ways to perform the binarization. In the first
solution, Achanta et al. [18] proposed the image-dependent
adaptive threshold for binarizing S, which is computed as
twice as the mean saliency of S:
T
a
=
2
W × H
X
W
x=1
X
H
y=1
S(x, y), (2)
where W and H are the width and the height of the saliency
map S, respectively.
The second way to bipartite S is to use a fixed threshold
which changes from 0 to 255. On each threshold, a pair
剩余15页未读,继续阅读
315 浏览量
289 浏览量
172 浏览量
2021-10-03 上传
2021-05-22 上传
272 浏览量
2021-05-22 上传
2021-09-30 上传

chent1995
- 粉丝: 2
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- React性的
- Distributed-Blog-System:分布式博客系统实现
- CloseMe-crx插件
- 欧式建筑立面图纸
- 北理工自控(控制理论基础)实验报告
- yolov7升级版切图识别
- 作业-1 --- IT202:这是我的第一个网站
- hit-and-run:竞争性编程的便捷工具
- Pytorch-Vanilla-GAN:适用于MNIST,FashionMNIST和USPS数据集的Vanilla-GAN的Pytorch实现
- SNKit:iOS开发常用功能封装(Swift 5.0)
- 创意条形图-手机应用下载排行榜excel模板下载
- 项目36
- 通过混沌序列置乱水印.7z
- reactive-system-design
- getwdsdata.m:从 EPANET 输入文件中获取配水系统数据-matlab开发
- 100多套html模块+包含企业模板和后台模板(适合初级学习)
