分层T网格上的多项式样条:高效建模与几何处理
4 浏览量
更新于2024-08-27
收藏 1.19MB PDF 举报
本文主要探讨了"分层T网格上的多项式样条"(Polynomial Splines over Hierarchical T-meshes,简称PHT样条),这是一种新型的几何建模工具,用于在复杂的层次T网格结构上创建精确的曲面模型。T网格是一种特殊的多分辨率网格,它能够自适应地表示几何复杂度,而PHT样条则是B样条在T网格上的扩展,具有B样条的关键特性,如非负性、局部支持和统一分配。
PHT样条的基础构造过程详细阐述了如何在T网格上定义这些样条函数,确保它们在保持多项式性质的同时,能够灵活适应几何变化。与传统的NURBS(Non-Uniform Rational B-Splines)相比,PHT样条的一大优势在于它们是多项式而非有理数,这使得计算更为简洁。同时,PHT样条的交叉插入和交叉去除操作被设计为局部且简单,便于曲面模型的修改和优化。
通过PHT样条,建模者可以高效地构建开放或封闭的网格模型,只需要解决少数线性方程组,大大降低了计算复杂度。这种方法特别适用于减少NURBS表面的冗余控制点,实现更紧凑的表示。此外,PHT样条还支持多种几何处理,如将PHT样条转化为张量积样条(Tensor Product Splines)的集合,以及在粗粒度的T网格上简化形状网络,从而简化几何操作。
PHT样条不仅保留了Sederberg T样条的适应性和局部性优点,还在连续性方面有所改进,实现了CI(Continuous Insertion)连续性,这对于保持曲面光滑度和细节至关重要。分层T网格上的多项式样条提供了一种强大的工具,可以简化几何建模流程,提高精度和效率,尤其适用于需要精细控制和高效计算的应用领域。
bottleneck of T-splines in practical applications. Compared
with T-splines and hierarchical B-splines, PHT-splines are
only C
1
continuous. However, PHT splines have a set of ba-
sis functions, which is a necessity in some theoretical anal-
ysis and applications, while hierarchical B-splines have a
redundant set of ‘basis functions’. On the other hand, hier-
archical B-splines require a very special hierarchical T-
mesh structure due to their refinement scheme, while
PHT-splines work over arbitrary hierarchical T-meshes.
The remainder of the paper is organized as follows. In
Section 2, we introduce polynomial spline spaces over T-
meshes and the dimension formula proved in [2]. Section
3 describes in detail the construction of the basis functions
of a spline space over a hierarchical T-mesh. The properties
of the basis functions are discussed and PHT-spline sur-
faces are introduced. Section 4 presents two important
operations—cross insertion and removal in PHT-spline the-
ory. In Section 5, we propose a surface fitting scheme to fit
open and closed meshes of genus-zero with PHT-splines. In
Section 6, some geometry processing algorithms such as
shape conversion and shape simplification are discussed.
Section 7 concludes the paper with a summary and some
future work.
2. Polynomial splines over T-meshes
In this section, we briefly review the definition of T-
meshes, and then introduce polynomial spline spaces over
T-meshes. The dimension formula of the spline space is
given.
2.1. T-meshes
Given a rectangular domain, a T-mesh is a partition of
the domain and it is basically a rectangular grid that allows
T-junctions [2,21]. It is assumed that the end points of each
grid line in the T-mesh must be on two other grid lines, and
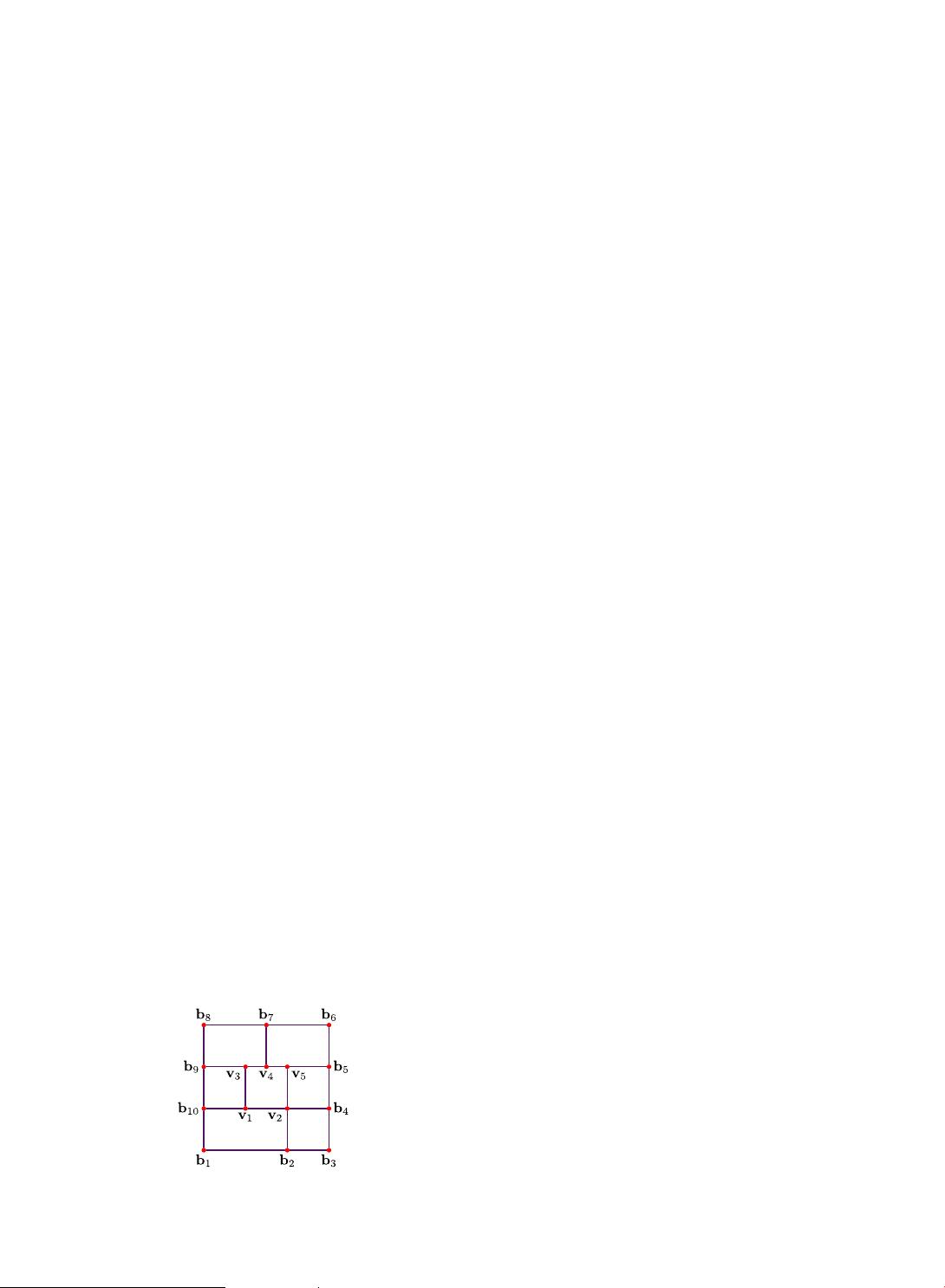
each cell or facet in the grid must be a rectangle. Fig. 3
shows an example of a T-mesh. A grid point in a T-mesh
is also called a vertex of the T-mesh. If a vertex is on the
boundary of the domain, then is called a boundary vertex.
Otherwise, it is called an interior vertex. For example, b
i
,
i ¼ 1; ...; 10, in Fig. 3 are boundary vertices, while all the
other vertices v
i
, i ¼ 1; ...; 5, are interior vertices. Interior
vertices have two types. One is crossing, for example, v
2
in Fig. 3; and the other is T-junctional, for example, v
1
in
Fig. 3. They are called crossing vertices and T-vertices,
respectively. The line segment connecting two adjacent
vertices on a grid line is called an edge of the T-mesh.
2.2. Hierarchical T-meshes
Instead of considering general T-meshes, we restrict our
attention to hierarchical T-meshes in the paper, since such
meshes do not lose the main property—adaptivity of gen-
eral T-meshes.
A hierarchical T-mesh is a special type of T-mesh which
has a natural level structure. It is defined in a recursive
fashion. One generally starts from a TP mesh (level 0).
From level k to level k þ 1, one subdivide a cell at level k
into four subcells which are cells at level k þ 1. For simplic-
ity, we subdivide each cell by connecting the middle points
of the opposite edges with two straight lines. Fig. 4 illus-
trates the process of generating a hierarchical T-mesh.
Hierarchical T-meshes have appeared in many research
disciplines in computer science, computational mathemat-
ics, and so on. For example, adaptive finite elements [25,
Chapter 15] and hierarchical B-splines [7] are defined over
hierarchical T-meshes.
2.3. Spline spaces over T-meshes
Given a T-mesh T, F denotes all the cells in T and X
the region occupied by all the cells in T. Define
Sðm; n; a; b; TÞ :¼fsðx; yÞ2C
a;b
ðXÞjsðx; yÞj
/
2 P
mn
for any / 2 Fg;
where P
mn
is the space of all the polynomials of bi-degree
ðm; nÞ, and C
a;b
ðXÞ is the space consisting of all the bivariate
functions which are continuous in X with order a along x
direction and with order b along y direction. It follows that
Sðm; n; a; b; TÞ is a linear space. It is called the spline space
over the given T-mesh T.
For a given T-mesh T, it is easy to see that T-splines (in
non-rational form) and hierarchial B-splines form a proper
subset of the spline space Sð3; 3; 2; 2; T
0
Þ in general, where
T
0
is a new T-mesh obtained by inserting some edges into
T. In this sense, the splines over a T-mesh are a generaliza-
tion of T-splines and hierarchical B-splines. This general-
ization makes full use of the current domain partition
and provides more flexibility in geometric modeling than
T-splines and hierarchical B-splines in practice.
Theorem 4.2 in [2] provides a dimension formula for the
spline space Sðm; n; a; b; TÞ for m P 2a þ 1 and
n P 2b þ 1. Specifically, we have
dimSð3; 3; 1; 1; TÞ¼4ðV
b
þ V
þ
Þ; ð1Þ
where V
b
and V
þ
represent the number of boundary verti-
ces and interior crossing vertices, respectively. The current
paper focuses on the spline space Sð3; 3; 1; 1; TÞ for a hier-
archical T-mesh T, though the results are also valid over
general spline spaces Sð2a þ 1; 2b þ 1; a; b; TÞ for a, b P 1.
The dimension formula gives us a hint on how to con-
struct basis functions for the spline space, i.e., each bound-
ary vertex or interior crossing vertex associates with four
basis functions. This observation will be further explored
in the construction of the basis functions in the next
Fig. 3. An example of a T-mesh.
78 J. Deng et al. / Graphical Models 70 (2008) 76–86
剩余10页未读,继续阅读
180 浏览量
点击了解资源详情
点击了解资源详情
2021-03-20 上传
2022-11-13 上传
点击了解资源详情
2024-11-07 上传
2024-11-07 上传
2024-11-07 上传

weixin_38645669
- 粉丝: 9
- 资源: 959
 我的内容管理
展开
我的内容管理
展开







最新资源
- 09年最新计算机统考大纲
- ethereal用法
- Java-jdbc 数据库连接详细教程
- 利用VLAN技术组建三层线速校园网
- 火箭发动机包覆层测厚的超声信号处理研究
- 面试的经典C++,大概有几百例题,很多公司都考那个作为入职的笔试题的
- 基于小波变换模极大值的橡胶薄层厚度超声检测
- 翻译轻松练英语四级常考翻译
- intouch 9.5 中文版 操作手册
- 堆与栈的区别堆与栈的区别
- 书籍DSP入门手册,实用的教程!
- 数字DS18B20温度传感器中文资料
- ERwin方法论(西南石油学院计算机科学系)
- windows驱动开发指南
- high-speed signal integrity design
- Signal-Integrity-Issues-for-High-Speed-Serial-Differential-Interconnects-DrShiue-NTU.pdf
