3D环境中自主机器人的最优金字塔可视覆盖策略
196 浏览量
更新于2024-08-26
收藏 990KB PDF 举报
"这篇论文研究了在复杂3D环境中自主机器人的最优可见性覆盖问题。安装在检查机器人上的感知传感器通常具有有限距离和角度的金字塔形可见范围。为给定的3D区域寻找最优的金字塔可见性覆盖是NP难的问题;论文提出了一种有效的渐进整数线性规划算法来计算近似解。该框架允许我们指定覆盖率参数,以平衡可见性和所需保护的给定区域的点的百分比。该算法在模拟的3D管道环境中进行了评估,对于检测管道的泄漏、堵塞和变形显示出潜力。"
本文深入探讨了如何在三维空间中为自主机器人优化视野覆盖,特别是在复杂环境下的任务。关键词包括3D环境、3D区域防护、近似解决方案、覆盖率、高效计算、范围传感器、可见范围以及视觉覆盖。在3D环境中,机器人的感知能力受限于其传感器的视野形状,通常是金字塔形,具有有限的探测距离和角度。
NP难问题是指在最坏情况下,找到问题的最优解所需的时间随着问题规模的增长呈指数级增长。由于为3D区域找到最佳视野覆盖是一个NP难问题,因此需要设计有效的算法来寻找接近最优的解决方案。论文中提出的渐进整数线性规划算法旨在通过逐步优化过程,找到一个接近最优的覆盖策略,以平衡机器人对目标区域的可见性和所需监控的关键点数量。
此外,论文引入了一个覆盖率参数,这是一个关键的设计元素,它允许操作者根据实际需求调整机器人的视野覆盖程度与需要重点保护的点之间的权衡。通过调整这个参数,可以在保证任务需求的同时减少计算复杂性或提高覆盖质量。
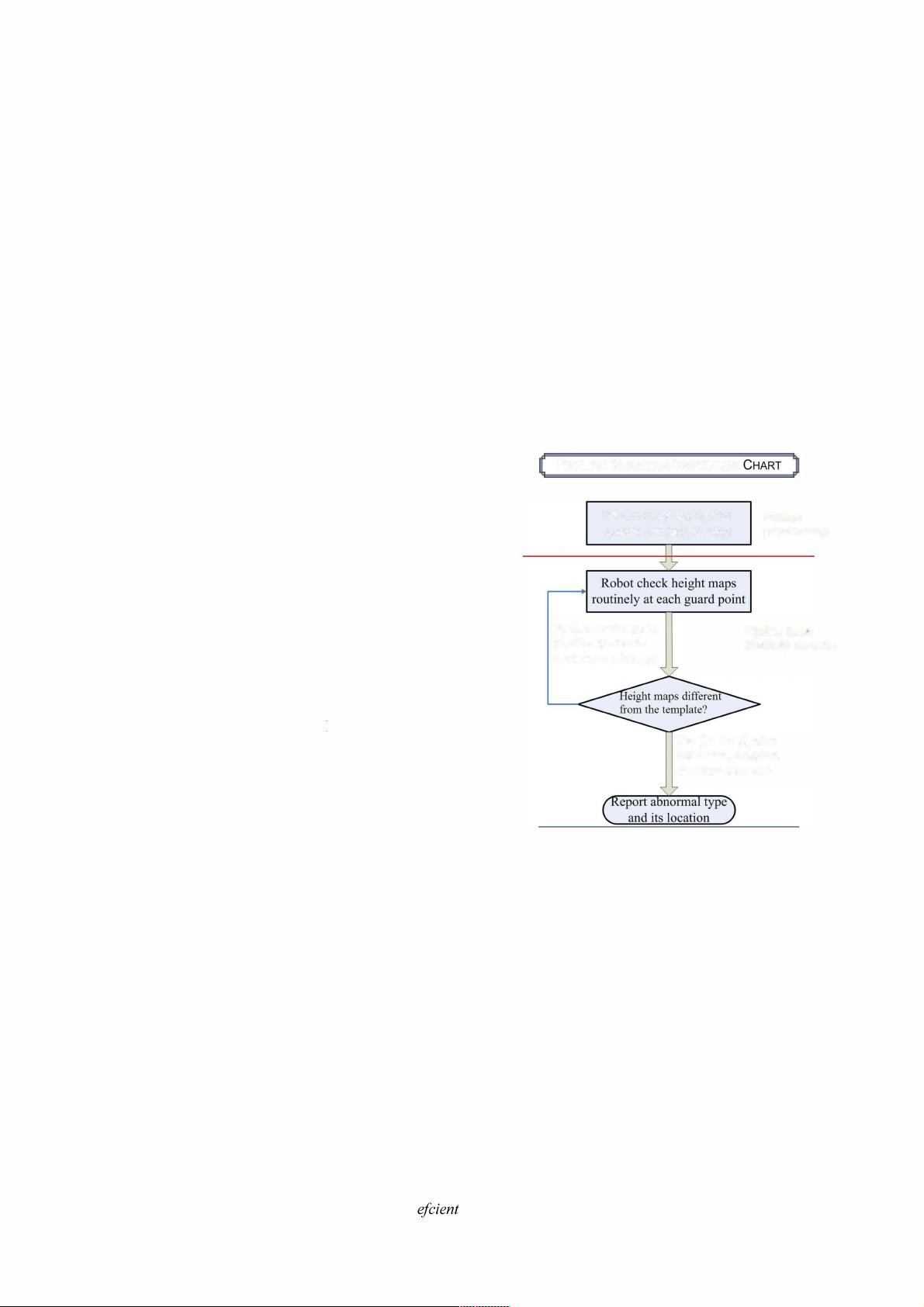
在实际应用中,这个算法在模拟的3D管道环境中得到了验证。这个环境对机器人的视觉覆盖能力提出了具体挑战,如需检测管道的潜在问题,如泄漏、阻塞或结构变形。实验结果表明,所提出的算法在这些任务中表现出了良好的性能,能够有效地帮助机器人定位和识别潜在问题,从而提高维护和监控的效率。
这篇论文提供了一种解决3D环境中自主机器人优化可见性覆盖的方法,为机器人在复杂环境下的任务执行提供了理论支持和技术手段,对于未来智能系统的开发和应用具有重要的参考价值。
Optimizing Pyramid Visibility Coverage for
Autonomous Robots in 3D Environment
[ ]
下载后可阅读完整内容,剩余5页未读,立即下载
2012-05-29 上传
2023-09-13 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-10-16 上传

weixin_38656064
- 粉丝: 9
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
