多目标规划方法详解:非劣解与求解策略
版权申诉
PPTX格式 | 528KB |
更新于2024-06-13
| 132 浏览量 | 举报
算法中的多目标规划方法讲义.pptx是一份关于数学模型算法的详细教程,主要聚焦于多目标规划这一领域。多目标规划,简称MOP,是指在优化过程中同时考虑两个或多个目标函数,这些目标可能是相互竞争或不完全协调的。帕雷托最早于1896年研究了此类不可比较目标的优化问题,随后众多数学家如冯·诺伊曼、库恩、塔克和日夫里翁等人进行了深入研究,但至今尚无一个普遍接受的完美定义。
解决多目标规划问题的主要方法包括:
1. 化简方法:如主要目标法、线性加权法和理想点法,将多目标转化为单目标或双目标,使其变得更容易处理。
2. 分层序列法:根据目标的重要性逐次优化,每次在前一个目标的最优解集中寻找下一个目标的最佳解,直到找到共同的最优解。
3. 线性规划的修正单纯形法:针对线性问题,可以对传统单纯形法进行调整。
4. 层次分析法:由沙旦提出,是一种定性和定量结合的决策与分析工具,适用于目标复杂且数据不足的情况。
多目标规划问题的数学模型通常包括两个基本部分:
- 目标函数:至少两个,用k维函数向量Z=F(X)表示。
- 约束条件:用若干个m维函数组成的向量(X)和常数向量G来表述,涉及n维决策变量X。
对于线性多目标规划,可以用矩阵形式表示:
- 决策变量向量X
- 目标函数系数矩阵C
- 约束方程系数矩阵B
- 约束向量b
在多目标规划中,求解不是寻找单一最优解,而是寻找所谓的"非劣解",即无法在所有目标中同时达到最优,但每个目标都不逊色于其他解。这意味着决策者需要在目标之间做出折衷,找到一个平衡点,以满足不同目标的需求。
在课程的实例部分,会展示如何应用多目标规划方法解决实际问题,可能涉及经济决策、项目管理、工程设计等领域的复杂决策场景。通过这些实例,学生可以理解多目标规划的实用性以及在不同情境下的应用策略。
9
9
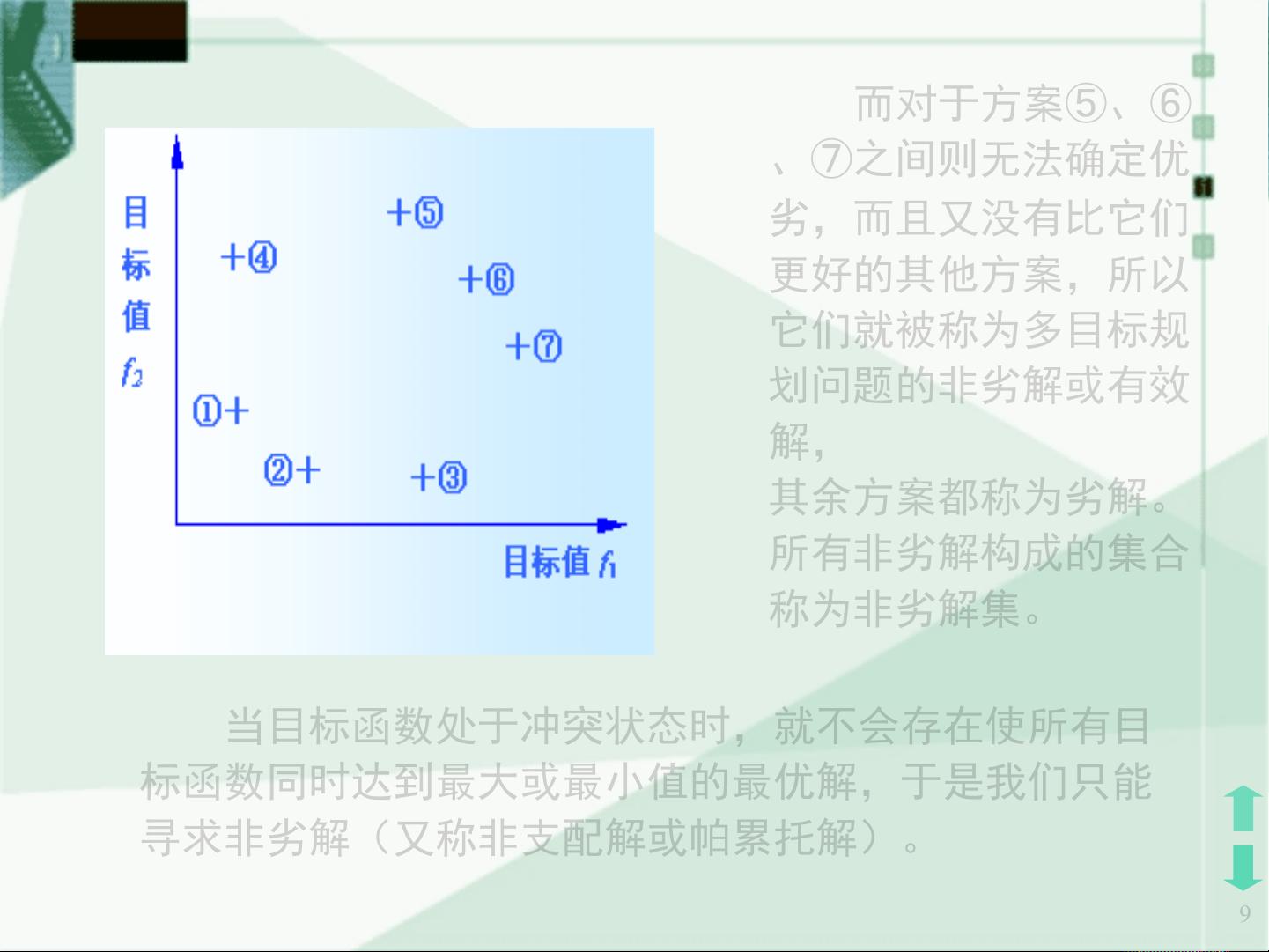
而
而
对
对
于
于
方
方
案
案
⑤
⑤
、
、
⑥
⑥
、
、
⑦
⑦
之
之
间
间
则
则
无
无
法
法
确
确
定
定
优
优
劣
劣
,
,
而
而
且
且
又
又
没
没
有
有
比
比
它
它
们
们
更
更
好
好
的
的
其
其
他
他
方
方
案
案
,
,
所
所
以
以
它
它
们
们
就
就
被
被
称
称
为
为
多
多
目
目
标
标
规
规
划
划
问
问
题
题
的
的
非
非
劣
劣
解
解
或
或
有
有
效
效
解
解
,
,
其
其
余
余
方
方
案
案
都
都
称
称
为
为
劣
劣
解
解
。
。
所
所
有
有
非
非
劣
劣
解
解
构
构
成
成
的
的
集
集
合
合
称
称
为
为
非
非
劣
劣
解
解
集
集
。
。
当
当
目
目
标
标
函
函
数
数
处
处
于
于
冲
冲
突
突
状
状
态
态
时
时
,
,
就
就
不
不
会
会
存
存
在
在
使
使
所
所
有
有
目
目
标
标
函
函
数
数
同
同
时
时
达
达
到
到
最
最
大
大
或
或
最
最
小
小
值
值
的
的
最
最
优
优
解
解
,
,
于
于
是
是
我
我
们
们
只
只
能
能
寻
寻
求
求
非
非
劣
劣
解
解
(
(
又
又
称
称
非
非
支
支
配
配
解
解
或
或
帕
帕
累
累
托
托
解
解
)
)
。
。
剩余52页未读,继续阅读
相关推荐


通信瓦工
- 粉丝: 382
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
