




"直线二级倒立摆控制问题的研究与仿真-毕业论文"
DOC格式 | 1.53MB |
更新于2024-03-14
| 191 浏览量 | 举报
In recent years, researchers have conducted extensive studies on the control problems of inverted pendulum systems. This thesis focuses on the control problem of a linear two-stage inverted pendulum. The research process and current status of control in inverted pendulum systems are first discussed. Then, the structure of the inverted pendulum system is introduced, and the mathematical model of the two-stage inverted pendulum is derived in detail. Different controllers are designed using pole placement and LQR optimal control methods. The effectiveness, stability, and disturbance rejection capabilities of these controllers are validated through comparison and MATLAB simulations. This study contributes to the understanding and application of control techniques in complex and unstable systems like the inverted pendulum. Keywords: inverted pendulum; pole placement; optimal control; MATLAB; simulation.
河南理工大学毕业设计(论文)说明书
10
第二章 直线二级倒立摆数学模型的建立
现代控制理论是基于状态空间法进行分析的,因此首先要建立系统的
状态空间方程。本章从二级倒立摆的物理结构出发,通过对其进行受力分
析和运动描述,对比两种建立数学模型的方法:牛顿力学分析方法、欧拉
-拉格朗日原理(拉格朗日方程)的优缺点,并选定欧拉-拉格朗日原理(拉
格朗日方程)对系统进行详细的数学建模,并进行必要的线性化处理和初
步的系统原理分析。
2.1 倒立摆系统的物理结构及特性分析
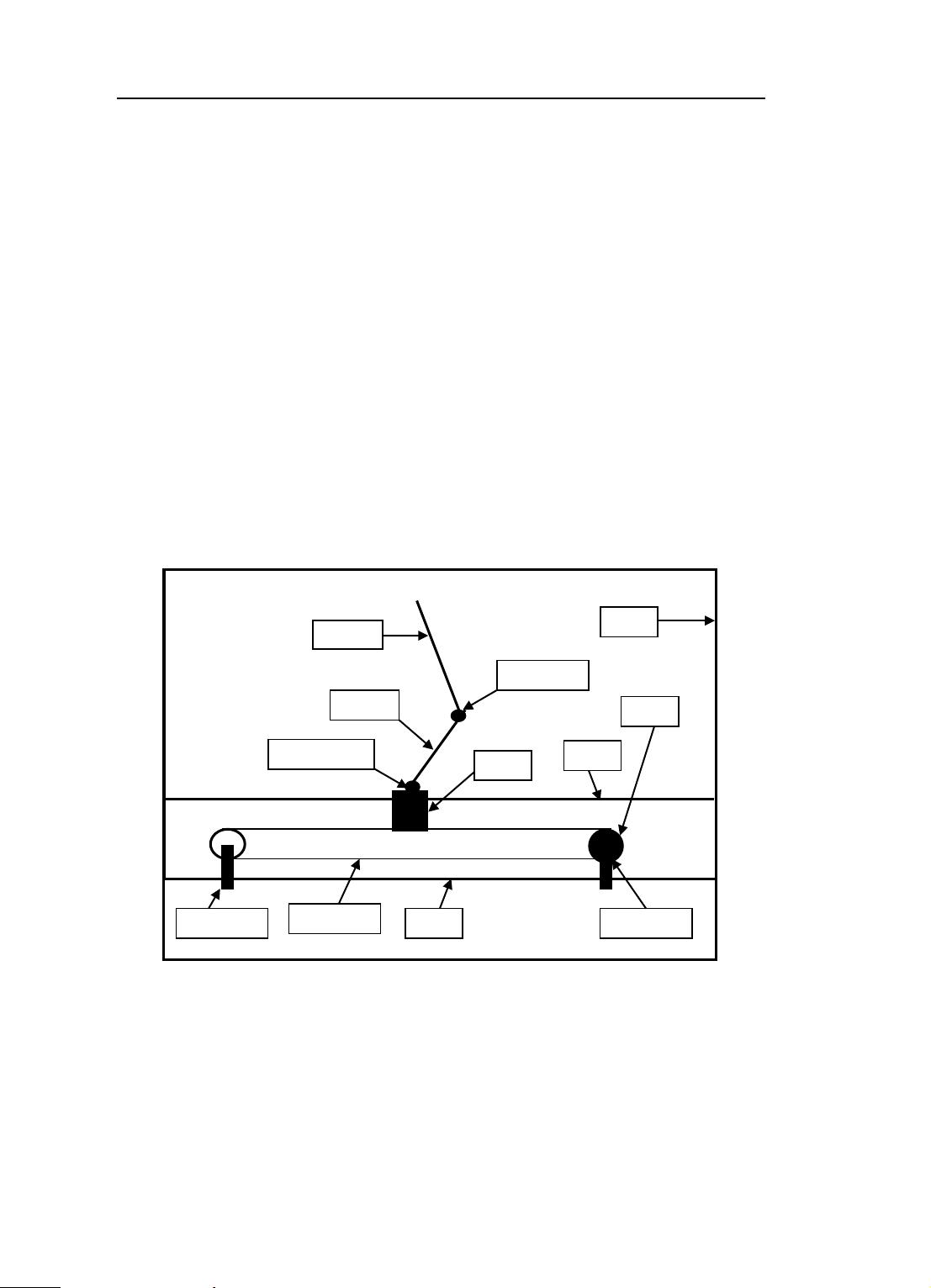
本次仿真设计的二级倒立摆模型系统由机械部分和电路部分组成。机
械部分包括底座,框架,滑轨,直流永磁式力矩电机,测速电机,电位器,
齿型传动皮带,小车,摆杆,触发开关以及一些连接轴等。主要机械结构
部分如图2-1所示。
2-1 直线二级倒立摆的物理结构图
对直线二级倒立摆控制系统而言,将功率放大器、力矩电机、小车、
摆、皮带及皮带轮等的组合体视为控制对象,其输入是功率放大器的输入
信号,输出是小车的位移和摆杆的角度。对直线二级倒立摆这个典型的机
上 摆 杆
下 摆 杆
测角电位器
测 角 电 位 器
小 车
滑 轨
框 架
电 机
水平调节栓
伪形传送带
底 座
测位电位器

剩余53页未读,继续阅读
相关推荐
645 浏览量
2023-07-01 上传
2023-06-28 上传
2023-07-09 上传
2023-07-05 上传
2021-09-27 上传

智慧安全方案
- 粉丝: 3884
 我的内容管理
展开
我的内容管理
展开








最新资源
- 2017版PHPWAMP绿色集成环境:一键定义多PHP站点
- SQL Server 2005数据库电子教案详细教程
- MATLAB实现SAGE算法:探讨布朗四舍五入的扩展应用
- 一键批量修改文件名,绿色免安装工具
- 打造中式客厅之美:3D模型设计详细介绍
- BCGControlBar经纬度输入控件V1.1版本发布
- 二叉树遍历算法实现:前序、中序、后序
- 垃圾桶3D模型设计教程与实践
- Flex文件上传组件:实现高效文件上传功能
- 汽车工厂升级计算器V1.08b-0912版发布
- SinatraWebScraper:自动化网页内容到短信的发送
- 公司前台柜3D模型设计的专业选择
- RCP与Velocity驱动的Java代码生成器详解
- QQ风格选项卡与彩色滚动条控件实现
- 手机端照片上传预览、压缩、旋转功能实现方案
- 中国植被分区矢量数据解读与应用






















