OMRON PLC在工业机械手步进控制的应用解析
需积分: 10 107 浏览量
更新于2024-08-08
收藏 221KB PDF 举报
"PLC在机械手步进控制中的应用 (2001年),作者史国生,主要讨论了使用日本OMRON C系列P型PLC对机械手进行步进控制的设计与实现,程序经过实际应用,表现出稳定可靠的性能。"
本文主要探讨了如何利用可编程逻辑控制器(PLC)来实现对机械手的精确步进控制。PLC作为一种常见的工业自动化设备,能够简化控制系统,降低硬件成本,并提高工作效率。文章以日本OMRON公司的C系列P型PLC为例,详细阐述了在机械手控制系统中的应用。
机械手在工业生产中扮演着重要角色,能够执行多种任务,如物料搬运、装配、切割等。通过PLC控制,机械手可以实现预设的复杂工序,确保动作准确无误。文中给出了一个具体的机械手示例,其任务是将物品从传送带A搬运到传送带B。为了确保动作安全,机械手的关键位置安装有限位开关,用于检测和确认每个动作的完成。
在机械手的动作流程中,PLC按照预定的顺序控制各个电磁阀,使得机械手依次执行上升、左转、下降等动作。例如,当起动按钮被按下,PLC会控制上升电磁阀,使得机械手手臂上升,直至上升限位开关被触发。接着,左转电磁阀通电,手臂左转,依此类推。同时,传送带A的运行由光电开关监控,只有在检测到物品存在时,才会启动抓紧电磁阀进行物品抓取。
文章详细介绍了PLC程序设计的过程,包括逻辑控制和定时器、计数器的运用,以确保机械手按照预期的顺序和时间执行各项任务。通过这样的控制策略,PLC能有效地协调机械手的各个动作,确保整体系统的稳定性和可靠性。
此外,作者还提及了PLC在实际应用中的优势,如简化控制线路,提高劳动生产率,以及通过软件编程实现灵活的控制逻辑。文章最后,作者史国生简介了自己的专业背景,他在电气传动控制、传感器和PLC领域有着丰富的教学和实践经验。
这篇论文深入浅出地解析了PLC在机械手步进控制中的具体应用,为工业自动化领域的工程师提供了宝贵的参考和指导。
第
1
卷第
4
期
南京师大学报(工程技术版)
Vo
l.
1 No. 4
2001
年
]OURNAL
OF
NAN
]l
NG
NORMAL
UNIVERSITYCENGINEERING
AND
TECHNOLOGY)
2001
PLC
在机械手步进控制中的应用
史国生
(南京师范大学电气与电子工程学院,南京,
210042)
[摘要]
以日本
OMRON
的
C
系列
P
型
PLC
为基础,介绍
PLC
在机械手步进控制中的应用,并给出了详细的
程序设计过程.该程序已在工业机械手中获得了应用,具有稳定、可靠的性能.
[关键词
J
PLC;
机械手;步进控制
[中图分类号
JTP241;
[文献标识码
JB;
[文章编号
J1008--1925(2001)04
一
0034
一
04
现了
!HWA
。
引言
机械手是工业自动控制领域中经常遇到
的一种控制对象.机械手可以完成许多工作,
如搬物、装配、切割、喷染等等,应用面非常广
泛.应用
PLC
控制机械手实现各种规定的工
序动作,可以简化控制线路,节省成本,提高劳
动生产率.
图
1
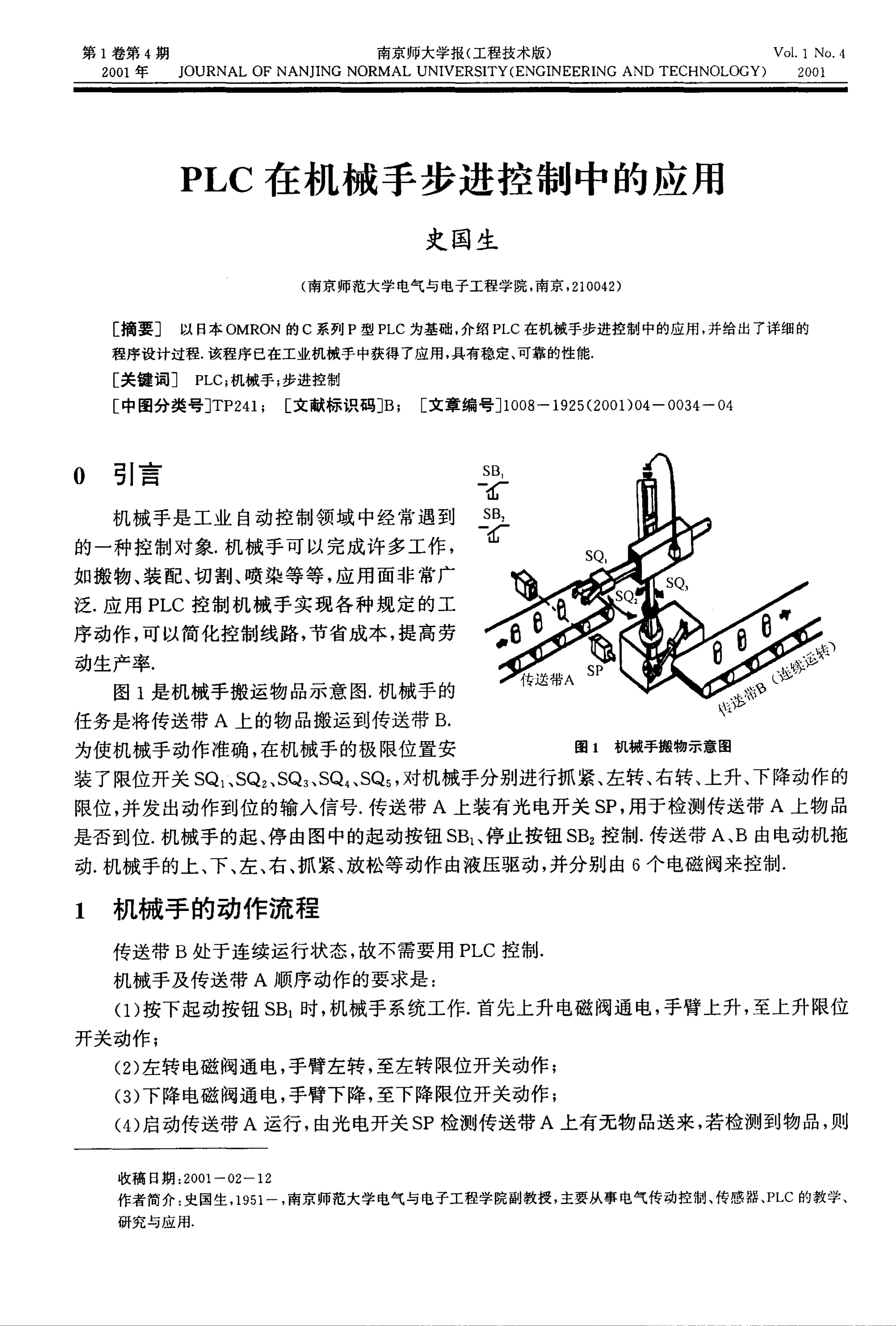
是机械手搬运物品示意图.机械手的
nr
任务是将传送带
A
上的物品搬运到传送带
B.
为使机械手动作准确,在机械手的极限位置安
图
1
机械手搬物示意图
装了限位开关
SQl
、
SQz
、
SQ3
、
SQ4
、
SQs
,对机械手分别进行抓紧、左转、右转、上升、下降动作的
限位,并发出动作到位的输入信号.传送带
A
上装有光电开关
Sp
,用于检测传送带
A
上物品
是否到位.机械手的起、停由图中的起动按钮
SB
1
、停止按钮
SB
z
控制.传送带
A
、
B
由电动机拖
动.机械手的上、下、左、右、抓紧、放松等动作由液压驱动,并分别由
6
个电磁间来控制.
1
机械手的动作流程
传送带
B
处于连续运行状态,故不需要用
PLC
控制.
机械手及传送带
A
顺序动作的要求是:
(1)按下起动按钮
SB
1
时,机械手系统工作.首先上升电磁阅通电,手臂上升,至上升限位
开关动作;
(2)
左转电磁阀通电,手臂左转,至左转限位开关动作;
(3)下降电磁阀通电,手臂下降,至下降限位开关动作;
(4)
启动传送带
A
运行,由光电开关
SP
检测传送带
A
上有无物品送来,若检测到物品,则
收稿日期,
2001-02-12
作者简介:史国生,
1951
一,南京师范大学电气与电子工程学院副教授,主要从事电气传动控制、传感器、
PLC
的教学、
研究与应用.
下载后可阅读完整内容,剩余4页未读,立即下载
2019-10-11 上传
2012-10-17 上传
2023-12-22 上传
2024-01-04 上传
2023-06-28 上传
2023-05-14 上传
2023-10-11 上传
2023-05-13 上传

weixin_38739101
- 粉丝: 7
- 资源: 945
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
