深度学习驱动自动驾驶:环境感知与关键技术
需积分: 50 169 浏览量
更新于2024-07-17
1
收藏 1.8MB PDF 举报
深度学习在自动驾驶中的应用已经成为互联网时代的重要趋势,它推动了智能驾驶领域的革新。自动驾驶技术融合了深度学习、计算机视觉、传感器融合以及多行业合作,旨在提升车辆的感知、决策和行驶能力。
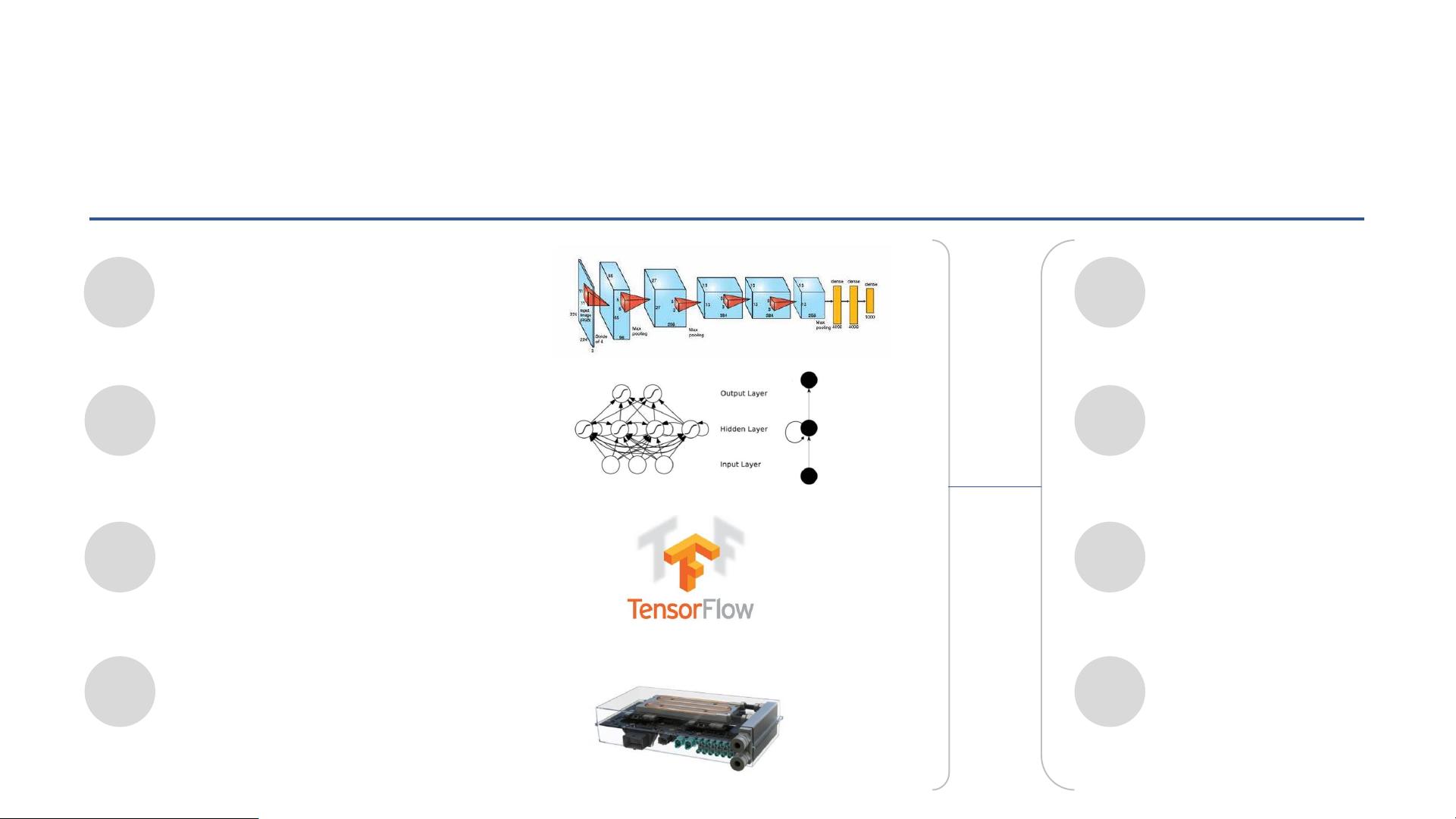
深度学习在自动驾驶中的核心作用主要体现在环境感知模块。通过卷积神经网络(CNN)、循环神经网络(RNN)和深度神经网络(DNN)等深度学习模型,如AlexNet、GoogLeNet和LSTM等,车辆能够高效地进行目标分类,精确识别200多个交通标志(如限速、限重)和30多个路面标识(如车道线、箭头和文字),实现对周围环境的细致理解。目标检测和跟踪是环境感知的关键环节,利用深度学习的无监督学习和强化学习,车辆能够实时跟踪和定位移动物体。
高精地图和地图元素矢量化也是深度学习发挥作用的地方。通过SLAM(同时定位和建图)技术,深度学习辅助车辆进行精确的定位,并将地图信息转化为机器可读的形式,为决策规划提供支持。此外,高精度定位技术如全球定位系统(GPS)与深度学习结合,进一步提高了导航的准确性。
决策规划模块是深度学习的另一个重要应用领域,涉及到复杂的路径规划和决策制定。深度学习的迁移学习使得模型能够在处理新场景时快速适应,结合强化学习,车辆能够学习最优驾驶策略,确保安全和效率。
驾驶员状态分析是深度学习在自动驾驶中的另一个潜在应用,通过监测驾驶员的行为和生理信号,预测可能的风险行为并采取相应措施,提升整体驾驶安全。
在硬件平台上,深度学习的执行依赖于强大的计算能力,如Nvidia PX2 GPU和Intel GO FPGA,以及深度学习专用平台如Caffe、TensorFlow和Torch。这些工具优化了模型训练和推理的速度与效率,同时考虑了功耗和跨平台的需求。
深度学习在自动驾驶中的应用涵盖了环境感知、目标分类、高精地图、决策规划等多个核心模块,不仅提升了自动驾驶的安全性和智能化水平,也促进了新能源汽车的推广,体现了深度学习技术在智能交通系统中的核心角色。随着技术的发展和政策的支持,未来深度学习将在自动驾驶领域发挥更加重要的作用。
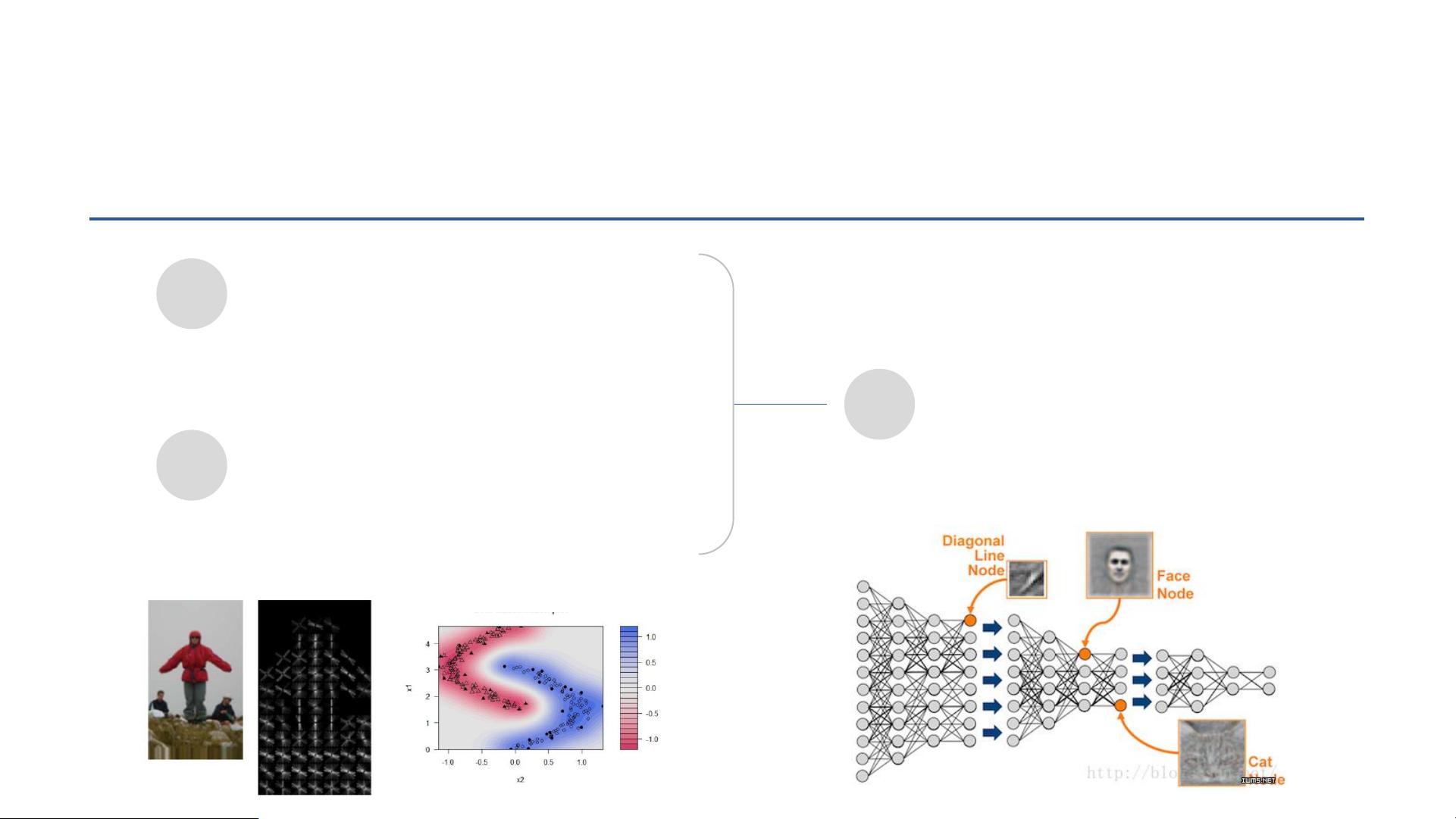
历史发展
深度学习
特征提取
sift, surf, lbp, harr, hog
人工设计特征
分类器学习
svm, adaboost, random forest
跟特征强相关
深度学习
特征提取和分类器学习
优秀的特征表达
剩余25页未读,继续阅读
2020-06-14 上传
2021-08-16 上传
2021-08-16 上传
2021-08-16 上传
2021-08-18 上传
2021-08-16 上传
2021-08-16 上传

苏麻离青05
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
