异步电动机矢量控制仿真:MATLAB/Simulink模型构建与应用
“电机MATLAB仿真,利用Matlab/Simulink构建了异步电动机的矢量控制仿真模型,包括转子磁链计算模型和异步电动机矢量模型,适用于教学和实验。”
本文主要讨论了如何利用MATLAB的Simulink工具进行异步电动机的矢量控制仿真实验。异步电动机矢量控制是一种模拟直流电机控制机理的方法,通过坐标变换将复杂的电动机模型简化,以便于理解和控制。具体来说,该文涉及以下关键知识点:
1. **矢量变换**:矢量变换是处理异步电动机控制的重要方法,它包括3-2变换(三相静止到二相静止)和2-2变换(二相静止到二相旋转)。3-2变换将三相交流电流转换为两相交流电流,2-2变换则将这两相交流电流转换为与电动机旋转同步的两相电流,这样可以更直观地分析电动机内部的磁场变化。
2. **转子磁链计算模型**:在异步电动机的矢量控制中,转子磁链的准确计算至关重要,因为它直接影响电动机的运行性能和效率。文中提到的3个转子磁链计算模型,分别对应不同状态下的电动机,可能包括启动、运行和制动等阶段,这些模型的建立有助于理解电动机的工作原理。
3. **异步电动机矢量模型**:这是基于实际物理特性的电动机模型,能够模拟电动机的动态行为。通过Simulink构建的矢量模型可以输入定子电流和电动机参数,然后获得各个物理量的输出波形,如转速、电磁转矩等。这种模型不仅可用于教学演示,还可以用于研究过渡过程和构建控制系统。
4. **Simulink仿真**:MATLAB的Simulink是一个图形化的仿真环境,允许用户通过连接不同模块来构建动态系统模型。在这里,Simulink被用来实现异步电动机的矢量控制仿真,通过封装好的模型,研究人员和学生可以方便地进行仿真实验,无需深入复杂的数学公式。
5. **模型封装**:封装模型是将已开发的模型组件化,便于重复使用和分享。文中提到的模型封装意味着用户可以直接调用封装好的模块,简化了仿真流程,提高了工作效率。
6. **应用与研究**:这些模型可以用来研究电动机的瞬态响应,比如启动、负载变化或突然断电等情况,同时也能作为基础构建不同类型的控制系统,如速度控制、位置控制等。
本文提供了一种基于Matlab/Simulink的异步电动机矢量控制仿真实现方法,通过转子磁链计算模型和矢量模型,使得对异步电动机的理解和控制变得更加直观和便捷,对于教学和科研工作具有很高的实用价值。
14 2009
年第
2
期
理论与设计
基于Matlab/simulink的异步电动机矢量模型的研究仿真
李军法 党智乾
西安航空职业技术学院(710089)
Simulation Research of Vector Models of Induction Motors Based on Matlab/Simulink
Li Junfa Dang Zhiqian
Xi'an Aeronautical of Ploytechnic Insititute
而利用Matlab/Simulink制作的异步电动机
矢量控制仿真中所需的3个转子磁链计算模型
及异步电动机矢量模型,可供教学和做仿真时使
用。在输入定子电流及异步电动机参数的情况
下,可以得到各物理量的输出波形。这些模型还
可以用来研究异步电动机的过渡过程,也可以用
来构建各种控制系统。
1 异步电动机矢量模型方程
按照异步电动机的实际物理模型所建立的
动态数学模型是一个高阶、非线性、强耦合的系
统。直接分析和计算这样的方程组十分不便,人
们研究了不同的简化分析方法,矢量变换法便是
其中的一种。矢量变换法的目的是模仿直流电机
的控制机理,来对异步电动机进行控制。其基本
思想是:首先进行坐标变换,包括三相静止-二相
静止变换(3-2变换),即三相交流电流
i
A
、
i
B
、
i
C
,
变换成二相静止坐标系上的交流电流
i
α
、
i
β
;二相
静止-二相旋转变换(2-2变换),即二相静止坐标
摘 要
:利用Matlab/Simulink制作了异步电动机矢
量控制仿真中所需的3个转子磁链计算模型及异步电动
机矢量模型,探讨了这些模型的实际使用问题。为方便
研究和实验使用,还对这些模型进行了封装。
关键词
:转子磁链计算模型 异步电动机 矢量模
型 Matlab/Simulink
Abstract: The vector models involving three rotor fl ux
linkages calculation models of induction motors, needed for
vector control system simulation were built with Matlab/
Simulink. In addition, the practical application problems
about the models were discussed as well as the maske of the
models for teaching and experiments purpose.
Keywords:
Rotor fl ux linkages calculation models
Induction motors Vector models Matlab/Simulink
目前,对异步电动机控制系统进行仿真时所
用模块取自M atla b/Si m ulin k库中的异步电动机
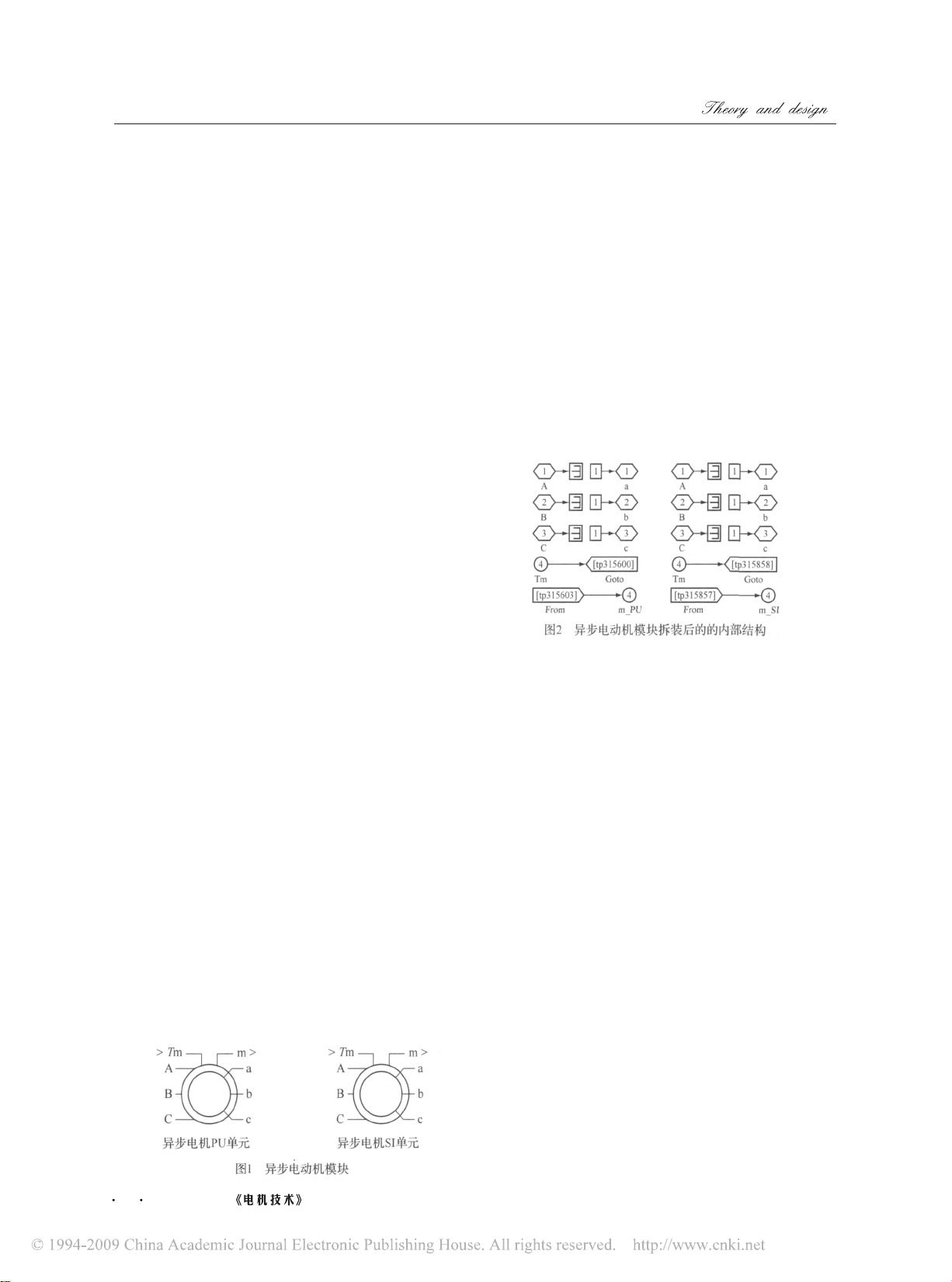
模块,如图1。异步电动机模块,其拆封后的内部
结构如图2。从图2看不出基于电机理论的异步电
动机模块内在结构,无论是对于研究还是对于教
学来说,都十分不便。学生无法将教材上的异步
电动机控制理论同所用模块结合起来,而对于研
究者,则无法选择、调整模块结构及参数值。
图1 异步电动机模块
异步电机PU单元
Tm
> m >
A
B
C
a
b
c
异步电机SI单元
Tm
> m >
A
B
C
a
b
c
图2 异步电动机模块拆装后的的内部结构
1 11
2 21
3 31
[tp315600]
4
[tp315603]
4
A
B
C
Tm
From
a
b
c
Goto
m_PU
1 11
2 21
3 31
[tp315858]
4
[tp315857]
4
A
B
C
Tm
From
a
b
c
Goto
m_SI
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-04 上传
2022-07-13 上传
2020-10-06 上传
2010-06-29 上传
2020-03-25 上传

streambread
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
