PID控制算法详解与实现
需积分: 8 71 浏览量
更新于2024-08-05
收藏 273KB DOCX 举报
"这篇文章主要介绍了PID控制算法,包括与常用控制算法的对比,PID理论分析,单片机实现,工程应用中的注意事项,演示板电路分析,以及基于ARM-CortexM3(STM32)的C语言实现增量式PID温度控制。"
PID控制算法是一种广泛应用的反馈控制策略,它的全称是比例-积分-微分控制器,因其包含三个关键参数(P,I,D)而得名。PID控制器通过结合这三个参数,能够有效改善系统的响应速度、稳定性和精度。
1. PID控制算法的理论分析
PID控制器的工作原理是根据偏差(设定值SV与实际值PV之间的差异)来调整输出信号。比例项(P)即时反应偏差大小,积分项(I)积累过去的偏差以消除稳态误差,微分项(D)则预测偏差变化趋势以提前进行补偿。通过合理设置这三部分的增益系数,可以实现对系统性能的有效优化。
2. 常用控制算法
- 位式控制:分为二位式、带有回差的二位式和三位式。二位式控制简单但反应粗糙,可能导致频繁动作和系统波动。带有回差的二位式控制可减少这种动作,但仍存在波动问题。三位式控制引入了功率调节,以减少波动并提高控制质量。
3. 基于单片机的PID算法实现
在单片机上实现PID算法,通常需要编写相应的控制程序,根据实时采集的PV值进行计算,并调整输出控制信号。对于嵌入式系统,如ARM-CortexM3的STM32芯片,可以采用增量式PID算法,这种方法占用较少的计算资源,且适用于实时控制。
4. 工程应用注意事项
在实际应用中,PID参数的整定是关键,需要根据具体系统特性进行调整。此外,还需考虑系统动态性能、抗干扰能力以及稳定性等问题。过度的控制可能会导致系统振荡,而不足的控制则可能无法达到期望的效果。
5. 演示板电路分析
PID控制系统的硬件设计包括传感器、控制器(如单片机)和执行机构。传感器用于获取PV值,控制器进行PID计算并输出控制信号,执行机构根据信号调整控制对象的状态。
6. C语言实现
在C语言中实现PID算法,可以将计算过程封装在函数中,通过调用该函数更新控制输出。对于增量式PID,每次只更新微分项,简化了计算过程。
PID控制算法通过集成比例、积分和微分功能,提供了灵活且高效的控制方案,广泛应用于各种工业自动化领域,如温度、压力、速度等的控制。正确理解和应用PID算法,能够显著提升控制系统的性能。
控制
主要内容:
常用的控制算法与 控制算法的异同点;
控制算法的理论分析
基于单片机的 算法实现
算法的工程应用的一些注意事项
演示板电路分析
算法 语言实现基于 的增量式 温度控制
一、 常用的控制算法:
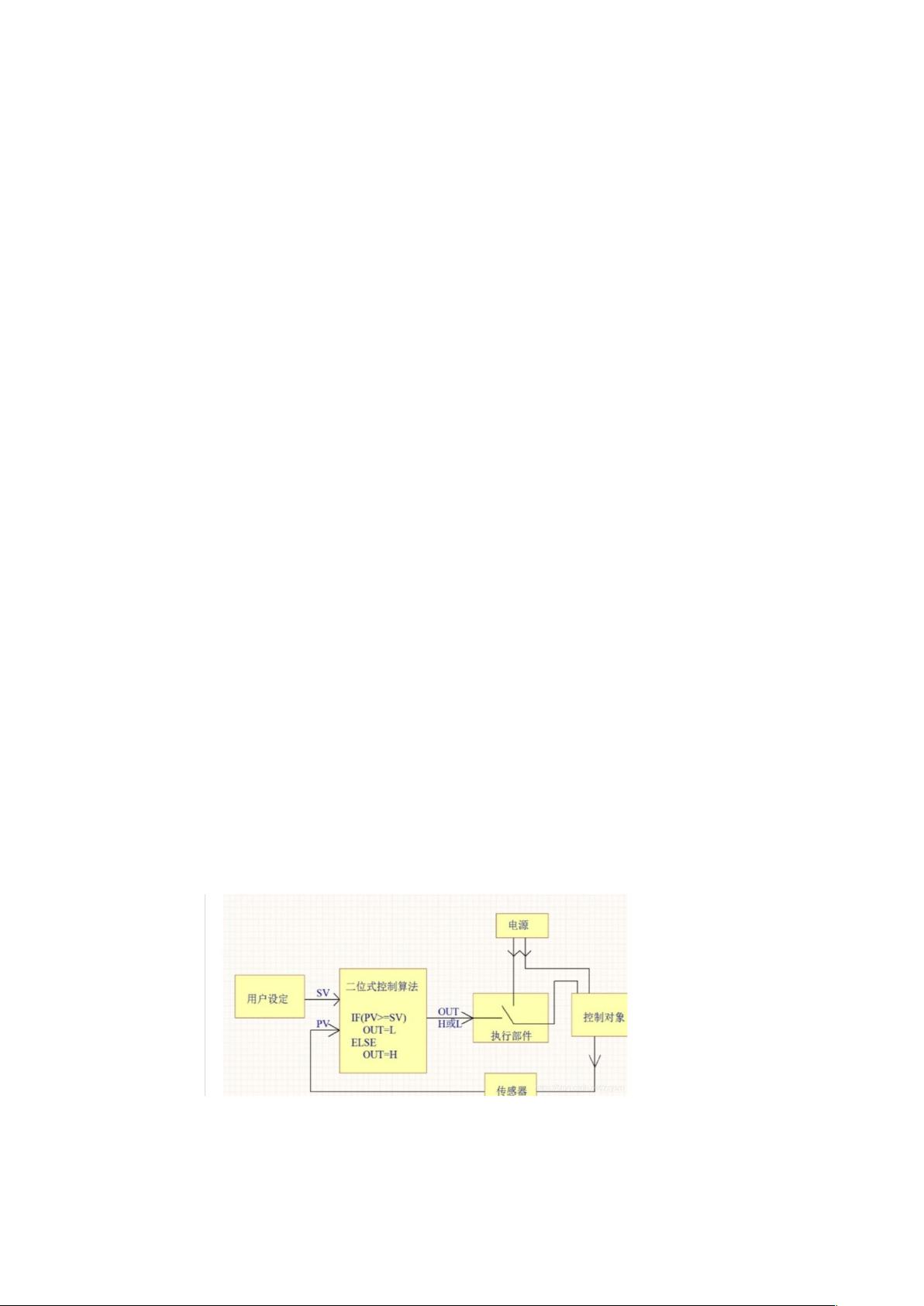
控制系统的基本结构:
控制目的:控制的根本目的就是要使控制对象当前的状态值与用户的设定值相同(最
大限度的接近)。
基本思想:用户设定值 与被控制对象当前的值 两者同时送入由特定硬件电路模
型或特定的软件算法组成的控制算法逻辑中,利用不同的控制算法对 和 进行分析、
判断、处理,从而产生当前应该输出的控制信号 控制信号经过执行机构施加到控制对
象上,从而产生预期的控制效果。
常用控制算法:
位式控制
二位式控制算法特点:
二位式控制算法输出的控制量只有高低 种状态。
执行机构使控制对象要不全额工作,要不就停止工作。当 低于 时全额工
作, 大于或等于 时就彻底停止工作。如果控制对象是一个 的加热器,
温度不到时就 全功率运行,温度达到时就停止工作。
!由于环境因素或控制系统传输延时或者控制对象本身的惯性等因素,控制效果
往往是 在 的上下有一个较大的波动。
"在 接近 的临界点时,控制输出信号 往往在 # 和 $ 之间频繁转换,导
致执行部件的触点频繁开关动作,易产生干扰及缩短执行部件的寿命。
具有回差的二位式控制算法特点:
%取 的正负 &左右作为回差调节上下限,高于上限才开始输出 $低于下限才
开始输出 #'%%
下载后可阅读完整内容,剩余7页未读,立即下载
2021-01-07 上传
2020-03-03 上传
2021-09-29 上传
2021-10-04 上传
2012-04-04 上传
2018-04-09 上传
2021-09-10 上传
2022-09-23 上传
2022-07-14 上传

qinjianfeng123
- 粉丝: 10
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
