ESC32电调Linux安装与调试全攻略(中文版)
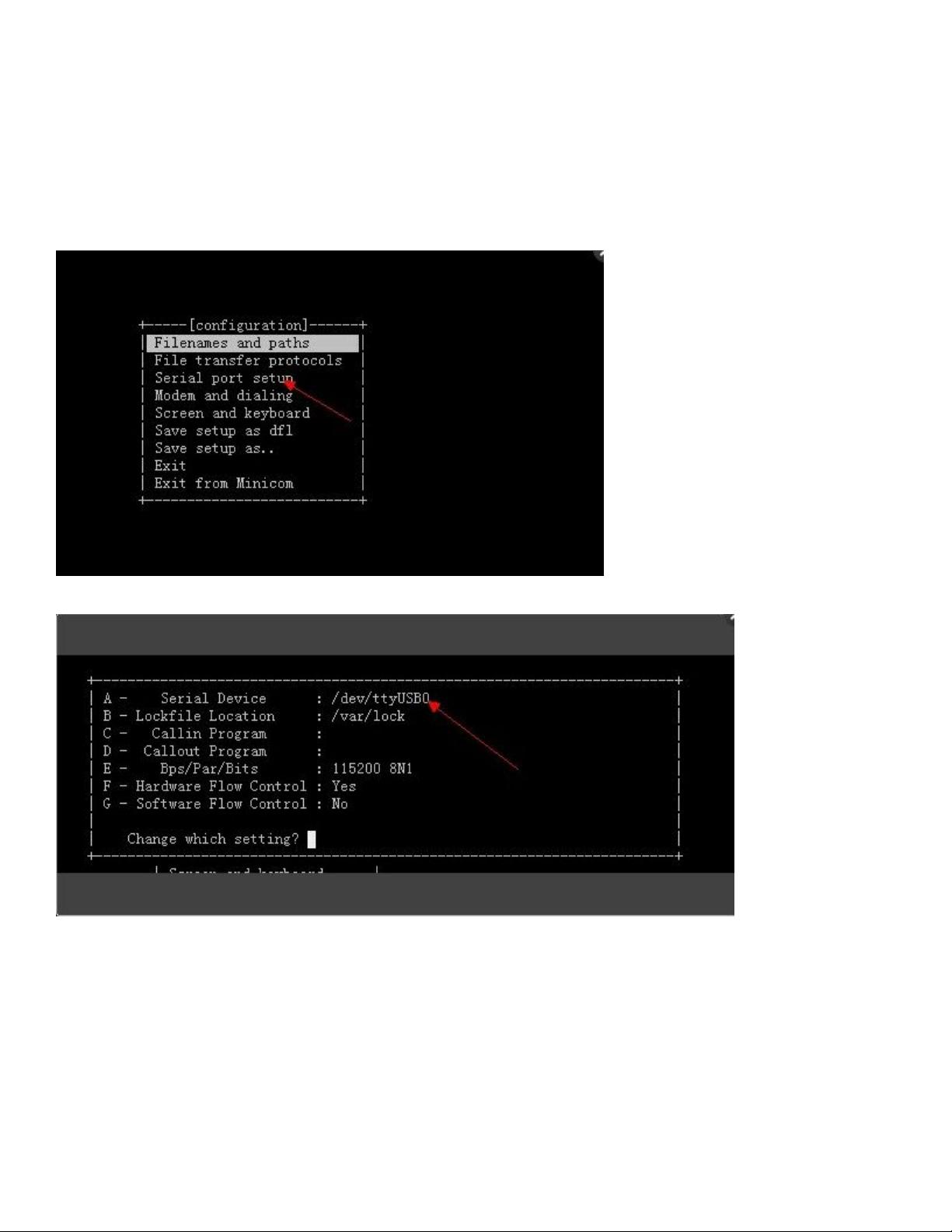
本文是一篇关于ESC32电调在Linux系统下的安装与调试教程,旨在帮助用户在Ubuntu Desktop环境下进行有效操作。首先,作者建议在已安装好Ubuntu Desktop的基础上,通过`sudo apt-get install minicom`命令安装minicom,确保使用`sudo minicom -s`来配置串口设置,如将Serial device更改为/dev/ttyUSB0,并设置波特率(BPS)为115200,保存设置并退出。
接下来,用户需要从ftp.autoquad.org的特定路径下载最新的ESC32 QGC原码包,推荐选择`qgroundcontrol_aq-Linux32-1.1.0.a1.tar.gz`,这通常用于地面控制系统的PC端应用程序。
安装过程中,需要安装一些必要的软件包,如`subversion`, `build-essential`, `libplplot-dev`, 和 `libeigen3-dev`,这些包对于ESC32电调的编译和运行至关重要。作者还提到,为了允许普通用户执行esc32Cal命令,需要将当前用户添加到`dialout`组,通过`sudo usermod -a -G dialout $USER`实现,并重新登录以确保权限。
在获取到最新的ESC32源代码后,用户应使用`svn checkout`命令克隆SVN仓库中的项目。之后,文章指导用户修改`Makefile`(在esc32/ground目录下),特别是调整Eigen3库的路径。找到包含Eigen3路径的`Makefile`,将原本的`/usr/local/include/eigen3`替换为实际的路径`/usr/include/eigen3`,以确保编译时能够正确链接到Eigen3库。
这篇教程详细地介绍了如何在Linux环境中配置ESC32电调,包括硬件连接、软件包安装、用户权限管理和源代码管理,确保了用户能够顺利地在Linux平台上进行ESC32电调的安装与调试工作。
Config Ubuntu Testing Environment Using for ESC32 RPM mode & Thrust Mode
**假设已装好 Ubuntu Desktop 板本
1. 安装 & 连接 minicom to Ubuntu
sudo apt-get install minicom
不要输入 sudo minicom
用 sudo minicom –s
将 Serial device 改 /dev/ttyUSB0
Bps 115200 8N1
Save setup as dfl
Exit
连接 USB0
dmesg | grep ttyUSB
ESC32 Ubuntu Setup Instrustion Version2.0 by fffmonkey1 Page 1
下载后可阅读完整内容,剩余4页未读,立即下载
2019-02-26 上传
2018-06-12 上传
2014-08-16 上传
260 浏览量
2015-10-09 上传
112 浏览量
2022-02-09 上传
2023-11-13 上传

wlaqq
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
