深度解析:车辆目标检测技术与性能评价
需积分: 50 41 浏览量
更新于2024-07-19
4
收藏 2.9MB PPTX 举报
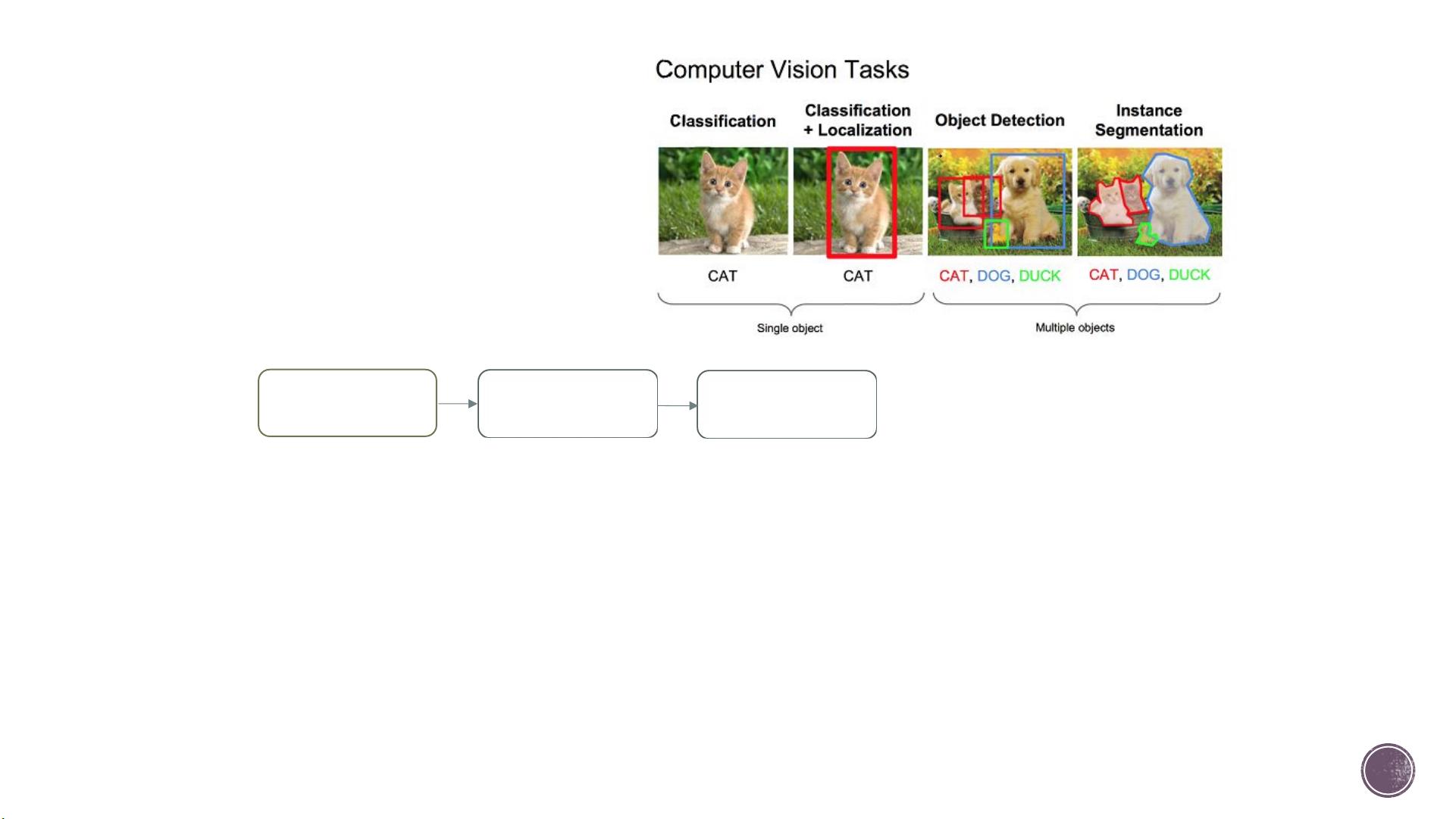
车辆目标检测是计算机视觉领域的重要任务,它旨在从图像或视频中自动识别和定位车辆等特定对象。这项技术在自动驾驶、智能监控、交通分析等多个应用领域发挥着关键作用。本文将深入探讨车辆目标检测的评价指标、算法介绍以及发展历程。
首先,评价车辆目标检测性能的关键指标包括:
1. **召回率(Recall)**:衡量检测算法找到所有目标实例的能力,即正确检测出的目标数占总目标数的比例。召回率越高,表示算法漏检的可能性越小。
2. **精确率(Precision)**:衡量检测结果中实际为正例的比例,即检测出的目标中有多少是真正车辆。精确率越高,误报的可能性越低。
3. **平均精确率(Mean Average Precision, mAP)**:在多类别情况下,每个类别都有一个召回-精确率曲线,mAP是这些曲线下的面积的平均值。mAP越高,整体检测性能越好,它综合考虑了召回和精确率。
4. **交并比(Intersection-over-Union, IoU)**:衡量预测框与真实框的重合度,用于评估检测框的准确性。通常设置一个阈值,当IoU超过该阈值时认为两个框匹配。
5. **非极大值抑制(Non-Maximum Suppression, NMS)**:在多框检测后,通过比较每个候选框与已选框的IoU,剔除重叠度较高的框,保留得分最高的,以此降低冗余检测。
传统的车辆目标检测方法,如基于滑动窗口的区域选择策略,存在效率低下和窗口冗余的问题。为解决这些问题,引入了**区域提议(Region Proposal)**的概念,这种方法利用图像特征如纹理、边缘和颜色等指导预选出目标可能存在的区域,显著提高了检测速度和精度。常用的区域提议算法有Selective Search和edgeBoxes。
在2012年的ImageNet大规模视觉识别挑战赛上,Geoffrey Hinton教授的团队使用卷积神经网络(Convolutional Neural Networks, CNNs)取得了突破,开启了基于深度学习的区域提案方法。其中,RCNN(Region-based Convolutional Neural Network)是一个里程碑式的模型,它结合了CNN的特征提取和传统的滑动窗口方法,实现了显著的性能提升。
后来,为提高处理速度,SPP-Net(Spatial Pyramid Pooling)引入了空间金字塔池化层,而Faster R-CNN则引入了RPN(Region Proposal Network),使得目标检测流程更加高效。这些算法进一步推动了车辆目标检测技术的发展,如今的车辆检测API如Google开源的,已经能够实现高效且准确的车辆检测结果。
车辆目标检测是一个涉及深度学习、计算机视觉和性能优化的复杂任务。通过不断改进的算法和技术,如区域提议、深度学习和NMS,车辆目标检测在实时性和准确性上都取得了显著的进步。
发展过程
传统目标检测方法
问题:基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余
手工设计的特征对于多样性的变化并没有很好的鲁棒性
区域选择 特征提取
分类器分类
剩余21页未读,继续阅读
2023-05-01 上传
2023-06-26 上传
2023-04-04 上传
2023-03-27 上传
2023-05-24 上传
2023-04-02 上传

三井梅
- 粉丝: 3
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
