Java多线程UDP服务器:并发运算与阻塞队列实践
145 浏览量
更新于2024-08-29
1
收藏 161KB PDF 举报
本实验旨在通过Java多线程编程技术来实现一个支持并发服务的网络运算服务器,主要目的是提升编程技能,尤其是处理网络并发和多线程间同步协作的能力,并理解线程安全的概念。服务器设计要求包括以下几个关键部分:
1. **多线程支持**:
- 服务器程序将采用多线程结构,每个线程负责处理特定的客户端请求,这样可以同时接收并处理来自多个客户端的运算请求,提高服务效率。
2. **UDP协议**:
- 服务器和客户端之间的通信基于用户数据报协议(UDP),UDP是一种无连接的、不可靠的传输协议,这意味着数据可能会丢失或乱序,但适合对实时性要求较高的应用,如游戏和流媒体。
3. **应用层协议**:
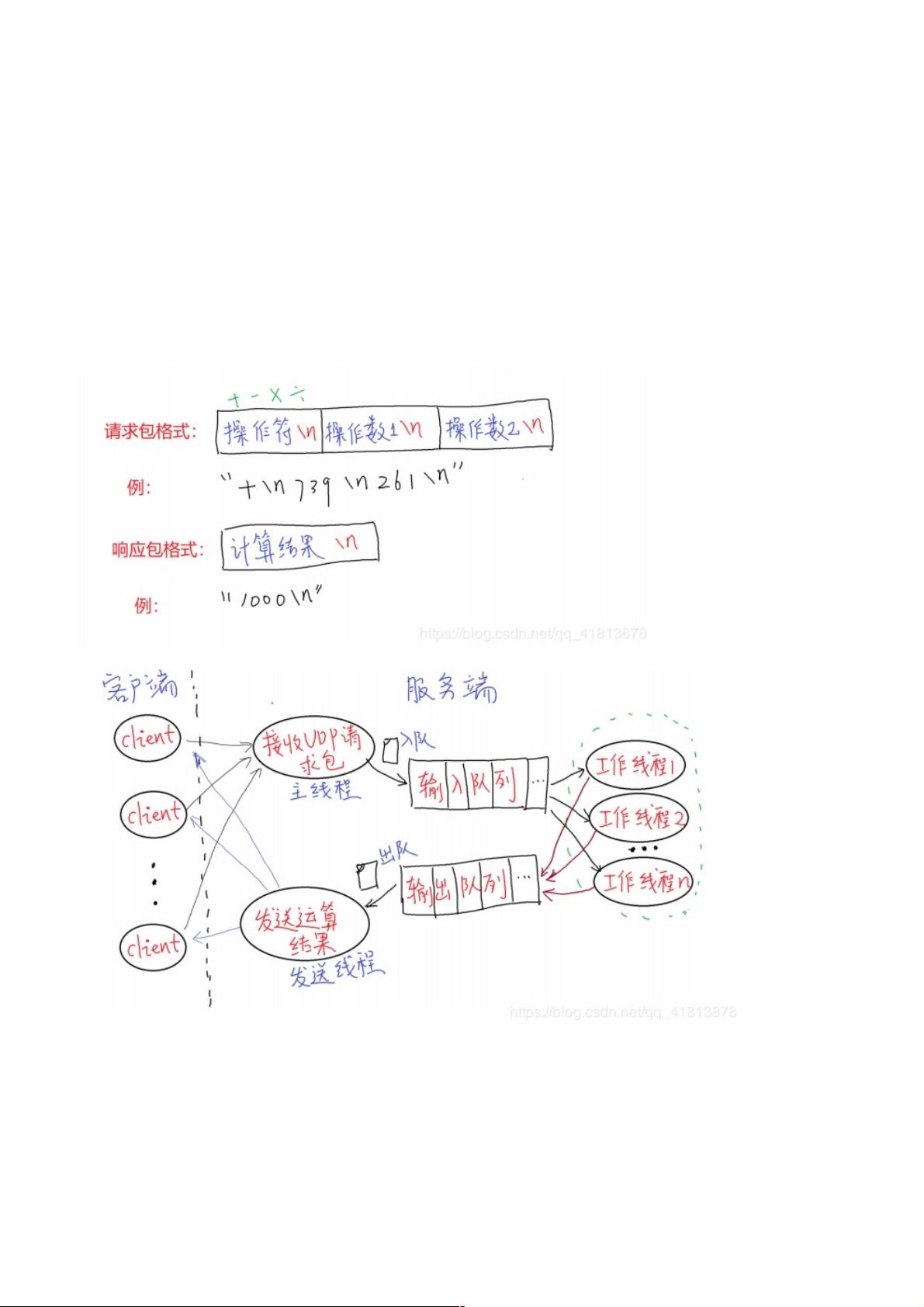
- 实验者需要自定义请求和响应数据包格式,这可能是固定的二进制或文本格式,包括运算类型标识符、请求参数以及用于后续操作的序列化数据。
4. **阻塞队列**:
- 服务器端利用`LinkedBlockingQueue`作为线程间通信的数据结构,这是一种线程安全的阻塞队列,它允许线程在向空队列写入元素时阻塞,直到有其他线程读取元素。这里有两个队列,一个用于存放客户端请求,另一个可能用于暂存计算结果或处理状态。
5. **线程安全与同步**:
- 在多线程环境中,由于多个线程共享资源,必须确保线程安全,避免数据竞争。实验者需要了解如何使用适当的同步机制,如synchronized关键字或并发集合,以防止数据一致性问题。
6. **服务器端结构**:
- `Server2`类中包含一个`ServerThread`子线程,它监听指定的端口,接收UDP数据包,解析请求,将其放入队列中,然后创建另一个线程处理这些请求。同时,可能还有其他辅助线程或者控制逻辑,如一个监控线程来统计不同运算类型的请求数量。
7. **实验要求**:
- 支持加、减、乘、除四种基本运算,意味着服务器需要具备执行这些算术操作的能力,并在响应中返回运算结果。
- 必须提供错误处理机制,如处理无效请求、网络连接问题或异常情况,以确保服务器的健壮性。
这个实验将深入实践Java多线程和网络编程,特别是结合UDP协议和阻塞队列的技术,锻炼开发者构建高效并发系统的能力,并加深对线程安全性和并发控制的理解。
UDP+阻塞队列阻塞队列+多线程多线程
一、实验目的
练习 Java 多线程编程技术。
练习实现网络并发服务的编程技术。
学习如何实现多线程间的相互同步和相互协作。
理解什么是线程安全。
二. 设计要求
功能概述:实现一个支持并发服务的网络运算服务器程序。该服务器能够同时接收来自
于多个客户端的运算请求,然后根据运算类型和请求参数完成实际的运算,最后把运算结果返
回给客户端。
具体要求:
(1)至少支持加、减、乘、除四种基本运算。
(2)服务器端能够分别记录已经成功处理的不同运算类型请求的个数。
(2)客户端与服务器端之间基于 UDP 协议进行通信。
(3)应用层协议自行设计。例如请求数据包、响应数据包可以采用如下格式:
(4)服务器端程序必须采用如下结构:
服务器端:
import java.io.IOException;
import java.net.DatagramPacket;
import java.net.DatagramSocket;
import java.net.InetAddress;
import java.net.SocketException;
import java.net.UnknownHostException;
import java.util.LinkedList;
import java.util.Scanner;
import java.util.concurrent.LinkedBlockingQueue;
import java.net.*;
import java.io.*;
public class Server2{
下载后可阅读完整内容,剩余3页未读,立即下载
2019-05-01 上传
2023-06-28 上传
2024-02-08 上传
2023-06-11 上传
2023-07-01 上传
2023-09-14 上传
2023-12-26 上传
2023-06-11 上传

weixin_38642636
- 粉丝: 12
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- Sentinel-1.8.1
- GU620:毕设-----在MODBUS协议下android与控制器GU620的通信
- Perthon Python-to-Perl Source Translator-开源
- dev-portfolio
- CourseaHTML
- URL缩短器:使用JavaScript,Node.js,MongoDB和Express的URL缩短器
- 【Java毕业设计】java毕业设计,ssm毕业设计,在线考试管理系统,源码带论文.zip
- dbR:数据库和R
- CaptainsBacklog:Scrum开发人员培训
- Android-Network-Service-Discovery:Android NSD 易学项目..
- quynhhgoogoo:描述
- maven-hadoop-java-wordcount-template:这是一个 Maven Hadoop Java 项目模板。 这个样板框架代码包含一个 Driver、一个 Mapper 和一个 Reducer,可以用你的代码修改(它们包含经典的 wordcount 示例)
- 【Java毕业设计】java 基于Spring Boot2.X的后台权限管理系统,适合于学习Spring Boot开.zip
- python实例-14 名言查询.zip源码python项目实例源码打包下载
- Book_Search
- dictionary-project
