ABB机器人编程Word Zone教程:步骤详解与安全域设置
需积分: 0 31 浏览量
更新于2024-08-04
1
收藏 1.07MB PPTX 举报
本资源是一份针对ABB机器人的编程教程,以Word zone的形式详细介绍了一个具体的编程过程。Word zone是ABB机器人中的一个功能,用于创建和管理安全区域,确保操作人员的安全。这份PPT教程包含了详细的步骤和示例,帮助用户理解如何运用ABB的编程语言进行安全区域的设置。
首先,用户需创建两种存储类型:一种是POS类型的数据,用于存储机器人的对角位置,强调不能将这些数据建立为变量,而是作为常量来确保其稳定性。其次,建立一个shapedata类型的存储类型,用作位置名称的关联,用于指定安全区域的形状和边界。
接着,用户需要定义一个wzstationary类型的变量或可变数据,作为触发条件的关联,这将指示何时执行特定的动作。然后,编写一个名为wordzone的子程序,该程序分为两个部分:WZBoxDef(用于定义方形物体的Word zone)和WZDOSet\Stat,其中Stat设置为持续触发信号输出,以便在满足条件时一直保持激活状态。
在实际操作中,用户会通过示教器进行配置,如进入控制面板、配置控制器、添加事件例行程序,并将其关联到poweron事件。用户还需要在信号编辑中设置D652_11_DO1为只读模式,防止未经授权的仿真输出。最后,设备重启后,用户会在示教器的日志中看到子程序的输出信息,确认Word zone的设置已成功启用,设备在上电时会自动运行wordzone子程序。
这份教程不仅提供了清晰的步骤指导,还涵盖了编程语言的细节和实际应用中的注意事项,有助于初学者快速掌握ABB机器人的Word zone编程技巧,提升工作效率和安全性。通过学习和实践,用户能够更好地理解和操作ABB机器人,实现精确的工业自动化任务。
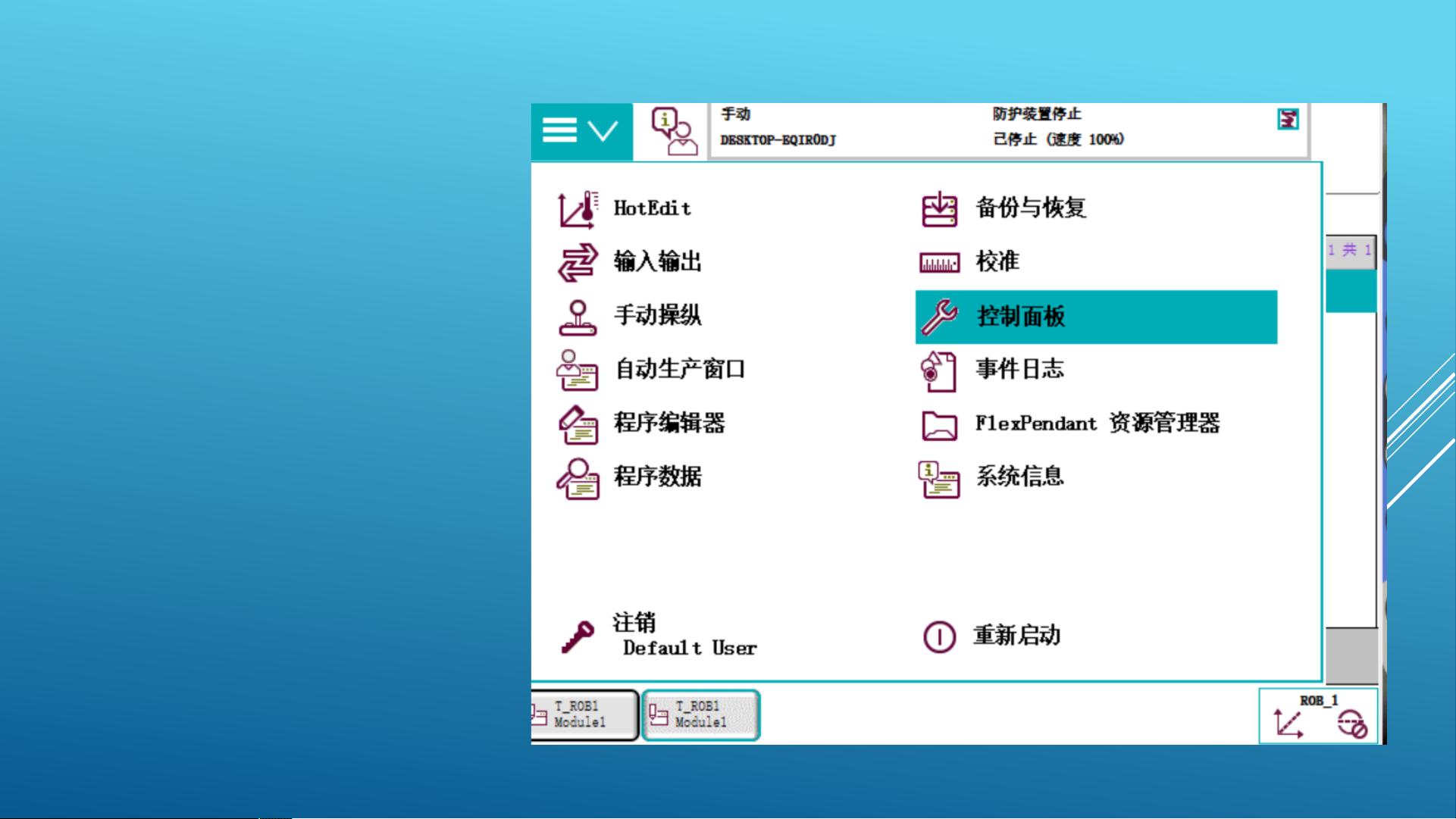
5:点击示教器菜单栏里面的控制面
板进入
剩余12页未读,继续阅读
2024-12-26 上传
2024-12-26 上传
基于stm32人体健康监测系统,包含pcb (心率,血氧,体温,语音播报,报警) 本设计采用STM32F103C8T6作为主控 使用MAX30102采集心率和血氧值 使用MLX90614测量体温 OL
2024-12-26 上传
2024-12-26 上传

weixin_59823555
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 双耳数据发生器
- JGit4MATLAB:JGit4MATLAB 是 MATLAB 中 JGit 的包装器。 它旨在从 MATLAB 命令窗口使用。-matlab开发
- lm-evaluation-harness:一次评估自回归语言模型的框架
- 粗React
- mybatis - 使用Spring+Springmvc+Mybatis实现秒杀商品案例.zip
- niu-ui:UI组件库
- studiodev:Primerapágina网站
- sysconst2020.2:计算许可证的材料数据库2020.2
- upptime:El Elliston James的正常运行时间监控器和状态页面,由@upptime提供支持
- 时尚抽象艺术下载PPT模板
- Harmonograph Generator:基于 4 个钟摆生成和声器的接口。-matlab开发
- maze-generator:基于Web的迷宫生成器
- 电子商务-java11springboot
- Java mybatis - 实践学习案例.zip
- 哑剧
- TextBuddyScripts:TextBuddy脚本的少量集合
