OC1: 新型多变量决策树 induction 系统
需积分: 0 67 浏览量
更新于2024-06-30
收藏 365KB PDF 举报
"Murthy S K , Kasif S , Salzberg S . A System for Induction of Oblique Decision Trees[J]. Journal of Artificial Intelligence Research, 1996, 2(1):1-32 - 多变量决策树OC11"
这篇研究论文详细介绍了Oblique Decision Trees(斜决策树)的构建系统,名为OC11。作者Sreerama K. Murthy、Simon Kasif和Steven Salzberg均来自约翰斯·霍普金斯大学计算机科学系。该系统结合了确定性的梯度上升法与两种随机化策略,用于在决策树的每个节点找到最佳的斜分割(表现为超平面)。
Oblique决策树方法主要针对具有数值属性的领域设计,尽管它们可以适应符号型或混合符号/数值属性的数据。与传统的轴平行决策树相比,斜决策树有潜力构建更小且更精确的模型。这是因为斜分割允许在特征空间中寻找更复杂的决策边界,这可能更好地捕捉数据中的非线性关系。
文章通过广泛的实证研究,包括使用真实和人工数据,分析了OC11构建斜决策树的能力。这些研究表明,OC11能够生成比其对应的轴平行决策树更紧凑且准确的模型。实验结果对算法的性能进行了深入比较,突显了在复杂数据集上斜决策树的优势。
在机器学习和人工智能领域,决策树是一种常用且易于理解的模型,常用于分类和回归任务。而Oblique决策树则扩展了这一概念,引入了更多的灵活性,尤其在处理具有多个关联特征的数据时,能够提供更好的预测性能。OC11系统的提出,为数据挖掘和模式识别领域提供了一种有效的工具,有助于提升模型的效率和准确性。
此外,论文还可能涵盖了优化过程的细节,包括如何在随机化过程中平衡探索与开发,以及如何评估不同分割的效果。这些技术对于理解OC11如何在决策树构造过程中寻找最优超平面至关重要。通过这种方法,OC11能够在保留决策树解释性的同时,提高模型对复杂数据模式的适应性。
这篇论文为机器学习社区提供了一个创新的工具,即OC11系统,用于构建更高效、更准确的决策树模型,特别是在处理数值属性丰富的数据集时。这种系统和相关方法的研究,对于提高模型的性能和理解数据内在结构有着深远的影响。
Murthy, Kasif & Salzberg
On the other hand, it is possible to dene impurity measures for which the problem
of nding optimal hyperplanes can be solved in polynomial time. For example, if one
minimizes the sum of distances of mis-classied examples, then the optimal solution can
be found using linear programming methods (if distance is measured along one dimension
only). However, classiers are usually judged byhow many points they classify correctly,
regardless of how close to the decision boundary a pointmay lie. Thus most of the standard
measures for computing impurity base their calculation on the discrete numb er of examples
of each category on either side of the hyperplane. Section 3.3 discusses several commonly
used impurity measures.
Now let us address the second issue, that of the complexity of building a small tree.
It is easy to show that the problem of inducing the smallest axis-parallel decision tree is
NP-hard. This observation follows directly from the work of Hyal and Rivest (1976). Note
that one can generate the smallest axis-parallel tree that is consistent with the training
set in polynomial time
if
the numb er of attributes is a constant. This can b e done by
using dynamic programming or branch and bound techniques (see Moret (1982) for several
pointers). But when the tree uses oblique splits, it is not clear, even for a xed number
of attributes, how to generate an optimal (e.g., smallest) decision tree in p olynomial time.
This suggests that the complexity of constructing go od oblique trees is greater than that
for axis-parallel trees.
It is also easy to see that the problem of constructing an optimal (e.g., smallest) oblique
decision tree is NP-hard. This conclusion follows from the work of Blum and Rivest (1988).
Their result implies that in
d
dimensions (i.e., with
d
attributes) the problem of producing
a 3-no de oblique decision tree that is consistent with the training set is NP-complete. More
specically, they show that the following decision problem is NP-complete: given a training
set
T
with
n
examples and
d
Boolean attributes, do es there exist a 3-no de neural network
consistent with
T
?From this it is easy to show that the following question is NP-complete:
given a training set
T
, does there exist a 3-leaf-node oblique decision tree consistent with
T
?
As a result of these complexity considerations, we to ok the pragmatic approach of trying
to generate small trees, but not looking for the smallest tree. The greedy approach used by
OC1 and virtually all other decision tree algorithms implicitly tries to generate small trees.
In addition, it is easy to construct example problems for which the optimal split at a no de
will not lead to the b est tree; thus our philosophyasembo died in OC1 is to nd locally
goo d splits, but not to spend excessive computational eort on improving the qualityof
these splits.
2. Previous Work on Oblique Decision Tree Induction
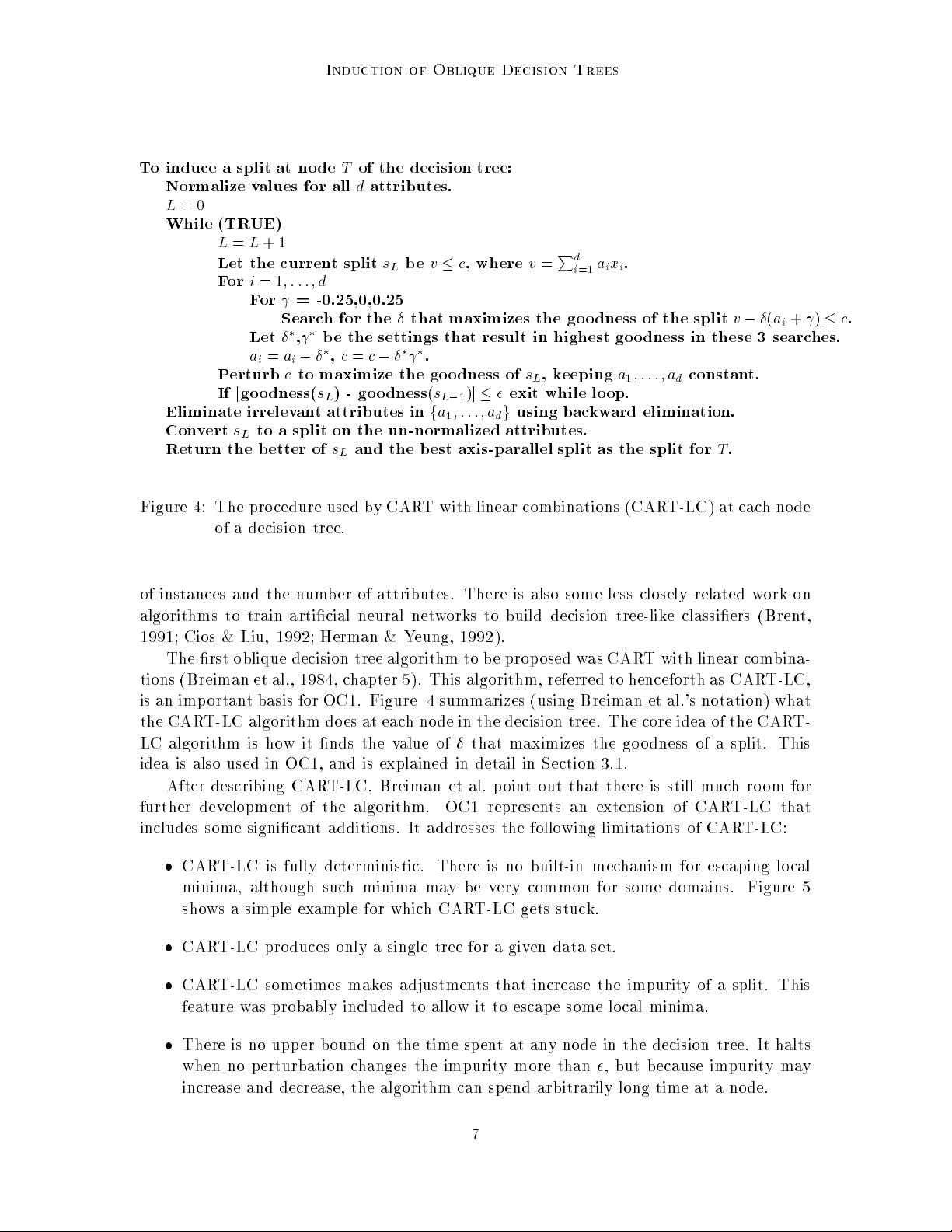
Before describing the OC1 algorithm, we will briey discuss some existing oblique DT
induction metho ds, including CART with linear combinations, Linear Machine Decision
Trees, and Simulated Annealing of Decision Trees. There are also methods that induce
tree-like classiers with linear discriminants at each node, most notably methods using
linear programming (Mangasarian, Setiono, & Wolb erg, 1990; Bennett & Mangasarian,
1992, 1994a, 1994b). Though these metho ds can nd the optimal linear discriminants for
specic goo dness measures, the size of the linear program grows very fast with the number
6
剩余31页未读,继续阅读
2018-07-23 上传
2022-08-03 上传
2023-09-04 上传
2021-04-27 上传
2021-05-07 上传
2010-06-11 上传
2021-07-02 上传
2021-07-01 上传
2009-01-20 上传

H等等H
- 粉丝: 43
- 资源: 337
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
