数控工作台MATLAB仿真:动态特性与稳定性分析
"该文档详细介绍了数控直线运动工作台位置控制系统的建模、MATLAB仿真以及系统性能分析。文中通过简化系统模型,忽略了黏性阻尼力矩和弹性力矩,构建了一个三阶系统的数学模型,并在忽略电枢电感的情况下将其近似为二阶系统。随后,通过对不同参数的分析,探讨了系统的时间响应和频率特性,并利用MATLAB进行了仿真,研究了放大器放大系数K对系统性能的影响。"
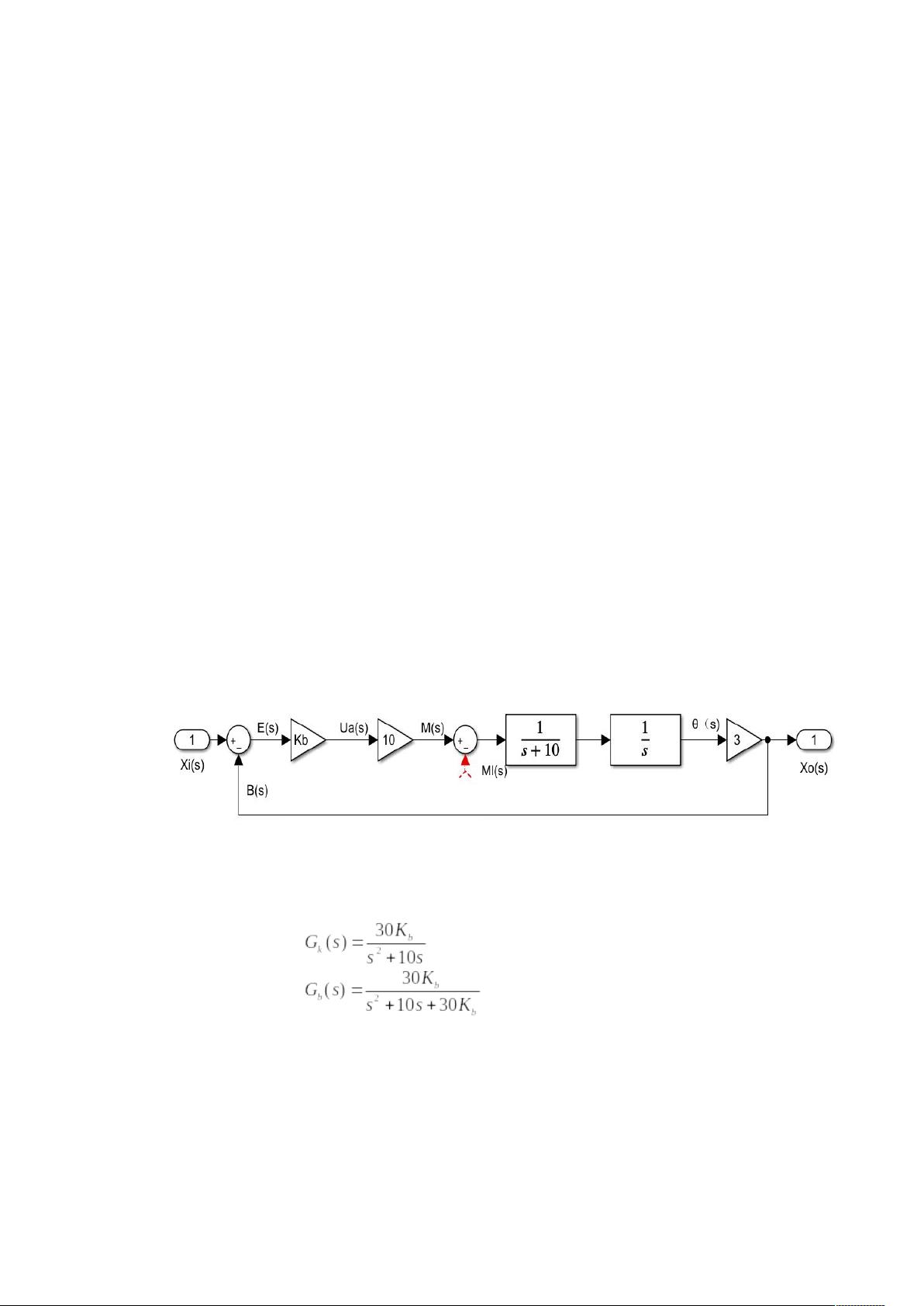
在数控技术中,直线运动工作台的位置控制系统是关键组成部分,用于确保高精度的定位和运动控制。该文档首先建立了工作台的数学模型,考虑了伺服电动机、滚珠丝杠传动、工作台质量等因素。通过动量守恒定理,推导出系统在给定输入和负载力矩作用下的传递函数,分别表示为(1)和(2)。这些函数描述了系统动态行为的基础,有助于理解和优化系统性能。
接着,文档分析了系统的动态特性,特别是在忽略电枢电感的二阶系统模型下。在这种情况下,系统的响应速度和稳定性主要由放大器的放大系数K决定。通过对不同K值的仿真,观察到系统瞬态性能的变化,例如上升时间、超调量和调节时间等,这些都是衡量系统快速性和稳定性的关键指标。
MATLAB作为一种强大的仿真工具,被用来计算和可视化这些性能指标。通过改变放大系数K,得到了不同开环和闭环传递函数的图形,从而能够评估系统在不同条件下的响应。例如,增大K值可能会提高系统的响应速度,但可能也会增加系统的振荡,这需要在设计时找到合适的平衡点。
此外,文档还提到了在设计数控直线运动工作台时要考虑的因素,如负载、位置精度、速度和加速度等,以及如何根据这些因素选择和调整伺服电机、传动装置和测量装置。控制器的设计也至关重要,因为它直接影响系统的稳定性和响应特性。
这份文档深入探讨了数控直线运动工作台位置控制系统的建模、仿真和性能分析,为理解和改进此类系统的动态行为提供了宝贵的理论和实践指导。通过MATLAB仿真,读者可以直观地理解系统参数如何影响系统的响应,这对于实际工程应用具有重要意义。
接下来我们将对改模型的动态特性进行分析和校正:
在忽略电枢电感的情况下,他是一个典型的二阶系统。现在来
分析采用不同的系统参数时,系统的瞬态性能指标和稳态性能指标
和频率特性如何变化。
在设计数控直线运动工作台时,一般是先根据系统负载、位置
精度、速度和加速度等方面的要求,初步选定伺服电动机、传动装
置及测量装置;然后根据系统稳定性、响应快速性和响应准确性等
方面的要求,设计控制器。因此,在分析系统的时域性能指标时,
与电动机有关的参数、与传动部件有关的参数一般是确定的。假设
确定传递方框如下,现在用 MATLAB 来分析放大器的放大系数 K,
取不同值时,系统的性能如何变化。
有方框图可得其开环传递函数和闭环传递函数分别为
利用 matlab 求瞬态特性的:
t = 0:0.001:1;
yss = 1;dta = 0.02;
剩余14页未读,继续阅读
2009-09-07 上传
2022-11-18 上传
2023-03-06 上传
2022-11-24 上传
2024-07-10 上传

weixin_46349353
- 粉丝: 4
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
