8051单片机控制的地铁自动门系统设计
版权申诉
116 浏览量
更新于2024-06-24
1
收藏 2.11MB PDF 举报
"基于单片机的地铁自动门设计"
地铁自动门系统是现代城市轨道交通中的重要组成部分,它在确保乘客安全、提升运输效率方面发挥着关键作用。本设计以8051单片机作为核心控制器,实现了地铁自动门的智能化操作。8051单片机是一款广泛应用的微处理器,因其性能稳定、性价比高而被广泛采用。
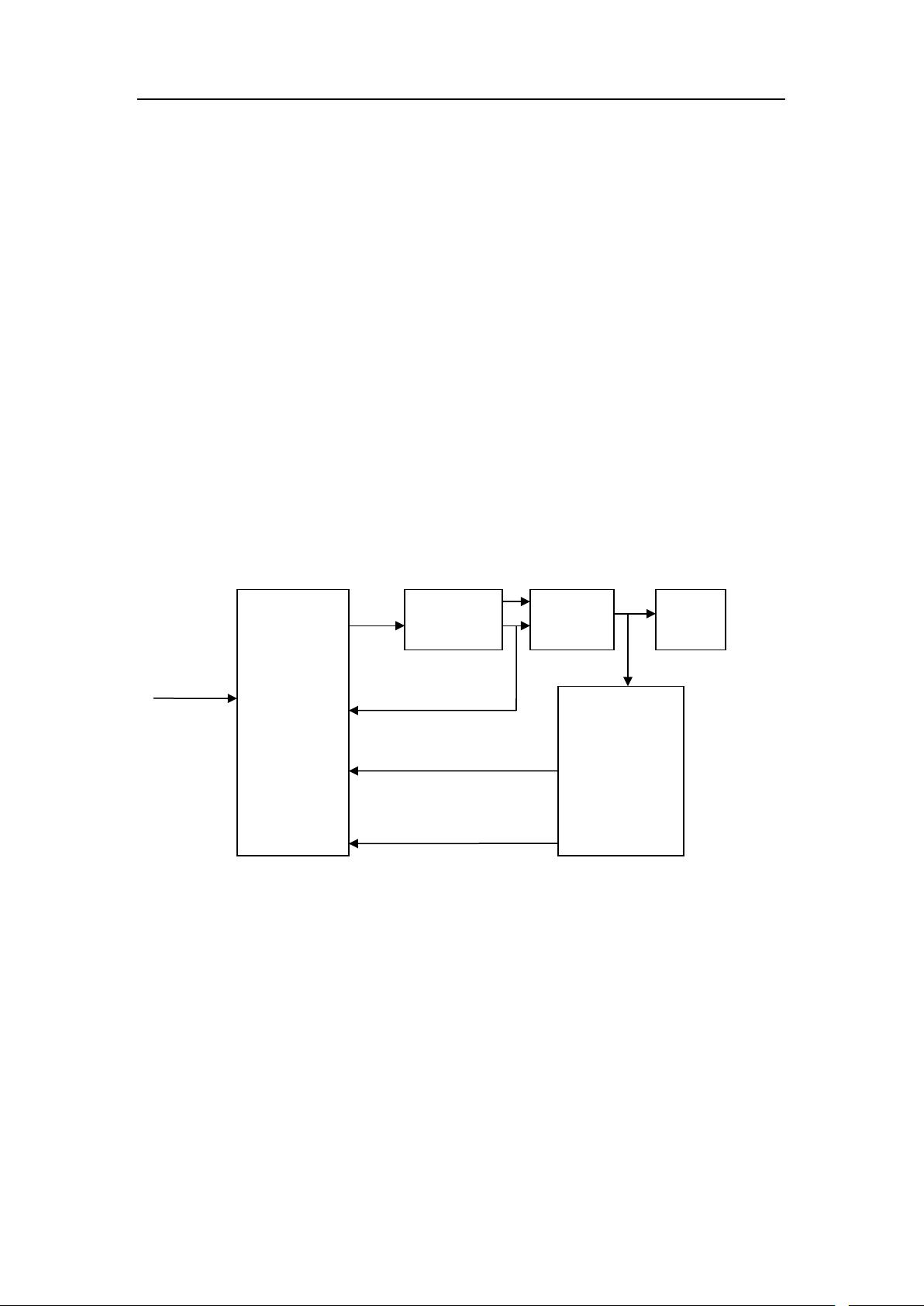
系统主要由以下几个关键部件组成:
1. 步进电机:步进电机是一种能够精确控制转动角度的电动机,通常用于需要精确位置控制的应用中。4相5线的步进电机在本设计中用于驱动地铁门的开启和关闭。通过改变单片机发送的脉冲信号,可以控制步进电机的转动方向和速度,进而实现门的平滑开关。
2. 驱动芯片ULN2803:这是一种达林顿管阵列芯片,用于驱动步进电机,提供足够的电流以驱动电机工作。ULN2803能够保护单片机不受大电流的影响,同时提供良好的电流控制。
3. 红外传感器:红外传感器用于检测门附近的物体或人员,防止门在关闭时夹伤乘客。当传感器探测到障碍物时,会向单片机发送信号,单片机据此立即停止或反转步进电机的动作,以确保安全。
4. 磁开关:磁开关作为状态检测元件,用于感应门的开闭状态,向单片机反馈门的位置信息。这有助于单片机准确控制门的运行,确保门的正常关闭。
系统设计中,单片机通过编程实现对步进电机的精确控制,包括电机的启动、停止、正反转等操作。同时,通过集成的红外传感器和磁开关,系统能实时监控门的状态,确保在任何情况下都能安全、有效地工作。整个系统的电路结构简洁,控制精度高,且具有较高的性价比,这使得该设计具有很高的实用性和参考价值。
关键词:8051单片机;地铁自动门;步进电机;红外传感器
在实际应用中,这样的地铁自动门系统不仅提高了地铁站的运营效率,还提升了乘客的出行体验。通过对8051单片机的深入理解和巧妙应用,设计者成功地将先进的自动化技术融入到了公共交通设施中,为城市交通的智能化发展做出了贡献。

6
理量实现在线实时控制。
2、监控。完成事故报警、事故处理、系统诊断及管理等。
3、数据处理 完成必要的数据采集、分析处理、计算、显不、记录等。
1.2 课题研究的意义和目的
随着电子科技的不断发展,
各种智能控制系统进入人们的生活。自动门控制系统成为地铁、超市等人流密集
地疏导人流、控制出入的首选。自动门能实现入门授权的自动识别控制和防挤压
等功能。
为了使地铁自动门能够更好的为地铁服务,
得到一种电路简单,软件功能完善,控制系统可靠,性价比较高的地铁自动门系
统,本文研究一种双翼对开式自动门控制系统,
实现了入门授权的识别控制和防挤压等功能。该系统以8051作为控制核心,直流
电机、红外传感器、磁开关相结合的系统。充分发挥了单片机的性能,具有一定
的使用和参考价值。

剩余57页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情

老帽爬新坡
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- annelesinhovski
- 乐活
- webseal:静态Web界面以生成密封的秘密
- thumbnailer:使用Minio的listenBucketNotification API的缩略图生成器示例
- 半导体行业研究:摄像头芯片(CIS)封装和晶圆行业对比-200225.rar
- 【地产资料】XX地产---经纪人实战入门教程.zip
- Excel模板财务报表可视化图表-收支利润表.zip
- react-clockit
- matlab-(含教程)基于harris和sift特征提取的图像配准算法matlab仿真
- frontend_tp
- alkemy-challenge-backend:后端deldesafíoAlkemy维护者CRUD
- awesome-flutter-plugins::fire::fire: 尽可能收集好用的Flutter插件以便更效率的开发,持续添加中 !! 不定期更新 ヾ(◍°∇°◍)ノ゙
- Excel模板小学生考试成绩统计表(模板).zip
- meteor-ng-cordova
- 毕业设计&课设--毕业设计-学校论坛系统.zip
- triple-triad-ui
