两轮自平衡机器人:建模、仿真与模糊控制研究
"两轮自平衡机器人建模与仿真"
两轮自平衡机器人是一种基于倒立摆原理的自动化设备,起源于20世纪90年代末,它融合了轮式机器人和自主移动的概念。这种机器人因其小巧的体积和灵活的运动能力,特别适合在狭窄和危险的环境中工作,无论在军事还是民用领域都具有广阔的应用前景。
本文首先介绍了两轮自平衡机器人的物理样机模型,包括机器人的主体结构和尺寸设计。通过深入的运动学和动力学分析,建立了数学模型,得到了描述机器人运动状态的空间方程。这些方程为设计有效的控制策略和适应不同工作环境的运动控制提供了理论基础。
在模型建立的基础上,论文使用Pro/E软件构建了机器人的三维几何模型,并在ADAMS/View中完成了仿真模型的构建,包括设置运动副和运动约束。通过仿真模拟了机器人在动态平衡、角度跟踪、速度跟踪、爬坡以及在受外部干扰时保持平衡等多种场景,验证了机器人的动态性能。
论文进一步探讨了模糊控制策略在两轮自平衡机器人中的应用,设计了一个两轮同步模糊控制器。借助ADAMS/Controls模块、MATLAB的Simulink工具箱和模糊控制工具箱,建立了一个虚拟的模糊控制系统,进行联合控制仿真,结果表明模糊控制策略能快速、稳定、精确地实现两轮同步控制。
通过对两轮自平衡机器人的建模和仿真分析,不仅获取了满足要求的动力学仿真数据,为实际工程提供了理论依据和数据参考,而且验证了机器人结构设计的合理性。论文最后成功研制出实物原型,实现了两轮自平衡机器人的实体构建。
关键词:两轮自平衡机器人;虚拟样机技术;动力学仿真;模糊控制
总结来说,这篇论文深入探讨了两轮自平衡机器人的建模与仿真技术,涵盖了从机械设计、运动学与动力学建模到控制策略(尤其是模糊控制)的全面研究,对于理解此类机器人的工作原理和控制系统设计具有重要的参考价值。
哈尔滨工业大学工学硕士学位论文
第2章 两轮自平衡机器人的设计
2.1引言
在当前的两轮自平衡机器人的研究中,为了适应各种复杂环境,对机器人
的响应速度和控制精度提出了很高的要求,这就导致机器人具备复杂的控制系
统,引起结构的变化和体积重量的增加,从而限制了两轮自平衡机器人的应用
范围n21。因此,合理的设计本体结构、确定本体尺寸、实现一定的控制要求,
是两轮自平衡机器人设计的关键。
2.2两轮自平衡机器人工作原理
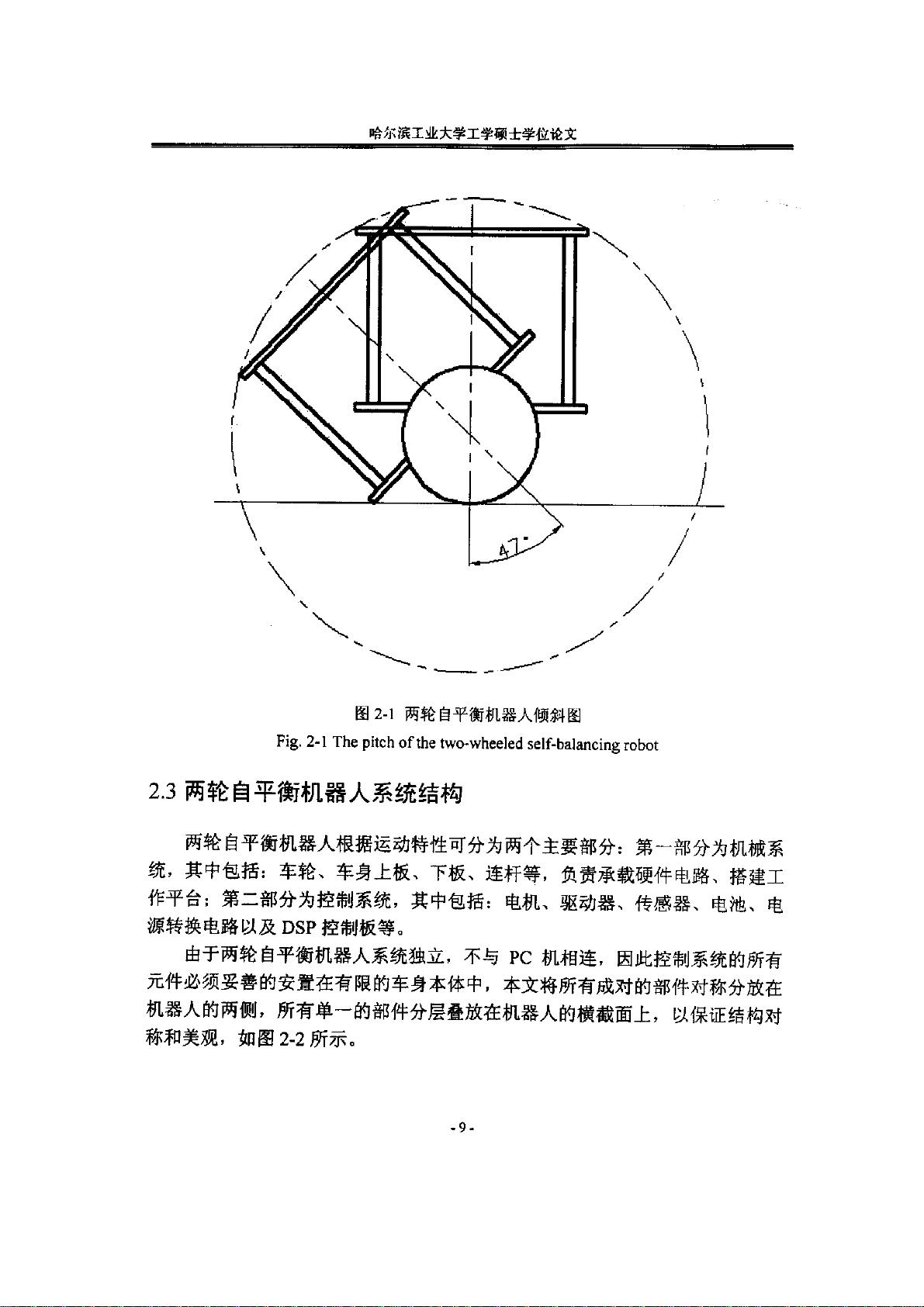
两轮自平衡机器人的侧面构架如图 2-1所示。左右车轮分别由两个电机驱
动,以电机轴心线为中心前后转动。若以车身垂直地面为 0度,则车身可摆动
范围为一47度至47度。
当未做控制时,不论车身向前倾斜或者向后倾斜,左右轮都是静止的状
态,也就是说车身前后摆动与车轮转动是相互独立的。
当开始控制时,车身在竖直站立的状态下释放,机器人有静止、前进、后
退三种运动的方式,在正确的控制策略下,机器人能够保持自身的平衡。
三种运动方式与控制策略如下所述:
(1)静止 如果车身重心位于电机轴心线的正上方,则机器人将保持平衡
静止状态,不需要做任何控制。
(2)前倾 如果车身重心靠前,车身会向前倾斜,则驱动车轮向前滚动,
以保持机器人平衡。
(3)后退 如果车身重心靠后,车身会向后倾斜,则驱动车轮向后滚动,
以保持机器人平衡。
因此,两轮自平衡机器人平衡控制的基本思想是:当测量倾斜角度的传感
器检测到机器人本体产生倾斜时,控制系统根据测得的倾角产生一个相应的力
矩,通过控制电机驱动两个车轮朝机器人要倒下的方向运动,保持机器人自身
的动态平衡。
剩余53页未读,继续阅读
184 浏览量
点击了解资源详情
1098 浏览量
379 浏览量
190 浏览量
319 浏览量

JamJoy
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
