基于神经网络的模糊自适应PID控制器在智能仪表中的优化应用
需积分: 9 172 浏览量
更新于2024-08-26
收藏 1.15MB PDF 举报
智能PID控制器在仪表中的应用是当前自动化控制领域的重要课题。传统PID控制器(Proportional-Integral-Derivative)因其结构简单、易于理解,在工业过程控制中被广泛应用。然而,它在实际操作中常常面临参数选择困难、对系统动态变化响应不灵敏等问题,特别是在复杂的仪表系统中,精确的参数自整定显得尤为重要。
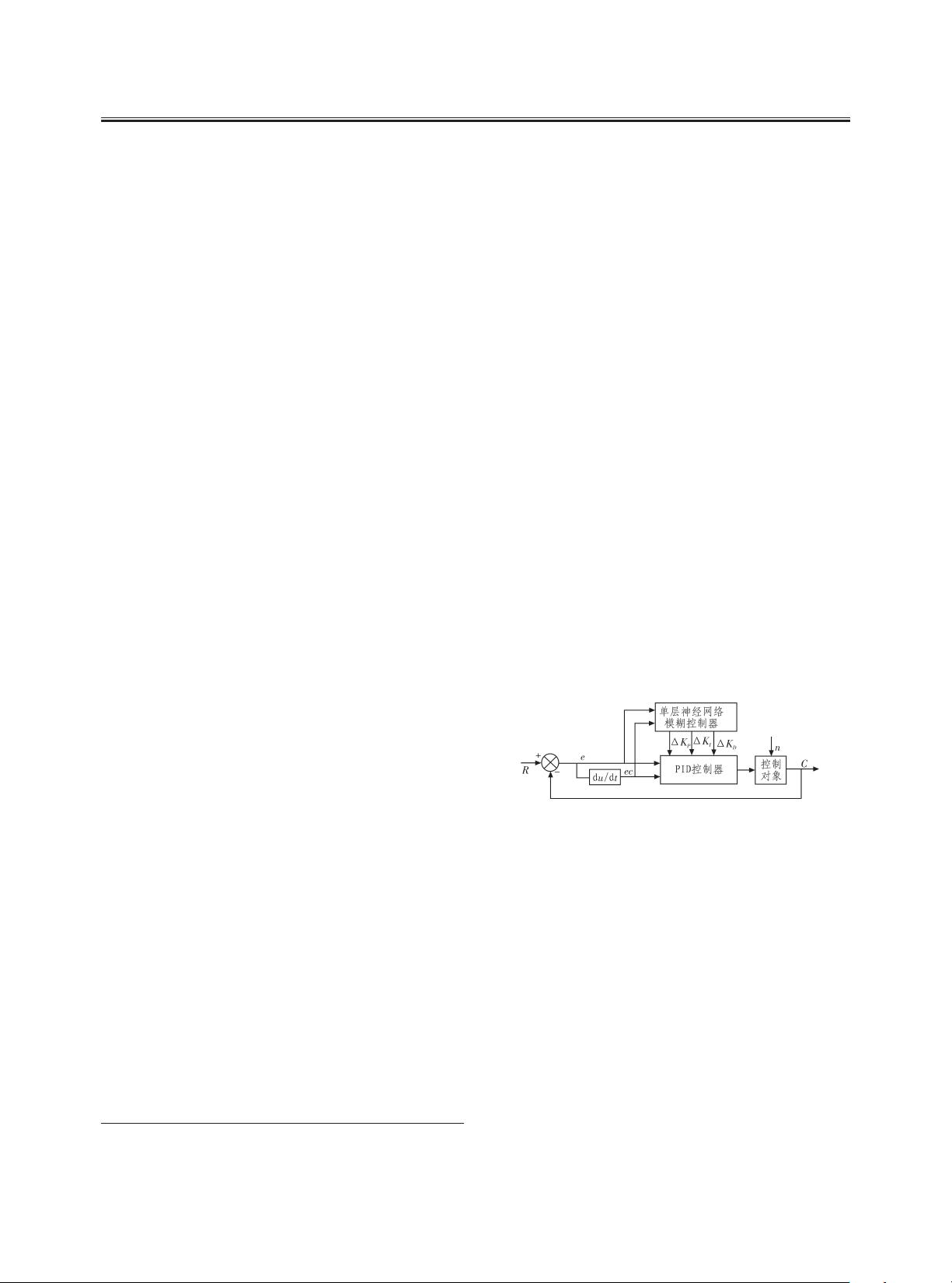
针对这一挑战,本文提出了一种创新的解决方案,即采用单层神经网络结合模糊自适应PID控制。这种设计思路将神经网络技术与传统的PID控制相结合,通过模糊逻辑规则的建立和推理,赋予了PID控制器自学习能力。单层神经网络作为一种简单的模型,可以有效地处理模糊控制中的非线性关系,使得控制器能够根据实时环境变化自动调整参数,从而提高控制精度和稳定性。
设计的关键在于,通过MATLAB/SIMULINK这样的高级仿真平台,对该模糊自适应PID控制器进行了深入的理论分析和实验验证。仿真结果显示,这种新型控制器具有显著的优点,如良好的鲁棒性,即使面对外部扰动或系统参数变化,也能保持稳定的控制性能;同时,实时性强,能快速响应控制需求,适合于实时控制的仪表系统。
此外,文章还探讨了如何通过网络训练和优化,进一步提升控制器的性能。通过与传统PID控制器的对比,可以明显看出模糊自适应PID控制器在复杂控制系统中的优势,尤其是在参数自整定方面,提高了自动化仪表的控制效率和精度。
总结来说,本文的研究不仅深化了我们对PID控制器的理解,而且展示了如何利用现代信息技术,如神经网络,解决传统PID控制的局限性,为仪表行业的智能化控制提供了新的可能。这项工作对于提升仪表设备的智能化水平,以及工业过程的高效、稳定运行具有重要的实际意义。
!"#$ %&'!()*+, - . / 0 1 2 3 4 5 , -
*+%6789":;< % = >&'"
!"#
*+? @A &'
B C % D + E F G H !I 0
!"#
J K L M !N O P Q R S T
PU
$%&
!VW: ;6 7.X YZ[\ /" ]^!W _ `a b,
- .!c d e f D + g h #i j D + g h k l m n o p q 4
Dg h r
$'()&
!ss? tuvw !xk y X z{ | } ~ !
SW # #tP%vw(" :6.\
/% h
!"#
D+! W % , -%D + .
Q % ! ? g h P R P % . !W
v w ( !x k ¡ G ¢ % £ ¤ !: 6 % D +
P ¥ ¦ Y@§ " ¨© ª £¤ !«¬ W h
!"#
%D
+ ®ª ¯ ° ©M ± ² ³´ µ % ~ ¶D +· ! ¸ ¡ ¹ º!
»¼ ½ ¾ ¿ \ W À Á Â % ~¶
!"#
D+ Ã!Ä ½ ©
HÅÆ/M±Ç ³´µÈÉ ~¶ Ê Ë%¼Ì R ÍÎ !
!"#
D+·ÏÐW¾ Á%=K"
!
!"#$%
Ñ ¬ Ä ½ % 0 M ± Ç ³ ´ µ % ~ ¶ ¾ ¿ \
!"#
D +
ghÒ/h~¶¾¿\
!"#
D+gh%¹»!dÓ
*
Ô"
IÓ
*
Sk Õ ½ !M± ²³ ´ µ% ~ ¶ ¾ ¿ \
!"#
D +
· k Ö ½
!
5 Ö °
"
% × Ø
#
$
$
%R × Ø < Ù
#!
$
$
%¨ Ö
° !WD + g hÚ Ð , -. !D + ·Û Ü 3 4
#
$
$
%R
#!
$
$
%!
Æ/M±Ç³´ µÝ~¶D+· %~¶ ÍÎ , -!
!"#
D + · %
)
Þ ß | $
%
!
#
%
"
#
%
#
% Ï Ð W à á ! k â ã ¦
#
$
$
%R
#!
$
$
%D+ß|%¦äå"
"
&'()*+,-./01"2345
M ± ² ³ ´ µ Ý % ~ ¶ D + · I æ ç q è J # é H
<#M±Ç³ ´µ klP êëìíî É !dÓ
'
Ô"
"#!
6789:; <=>
Ñ ¬ ï ð ñ ò æ ç q ó | ô ¨ Ñ ¬ Ä ½ % 0 M ± Ç
³´ µ Ý %~ ¶¾ ¿ \D +· %æ ç qè J ó | !õ ö è
Ó
*
0M±²³´µ%~¶¾¿\
!"#
D+gh%¹ »
+,-. * /01 234563541 78 8599: ;<;=3,>1 !"# 67?347@ 2:231A B;21< 7?
2,?-@1C@;:14 ?154;@ ?13D74E
智能 $%& 控制器在仪表中的应用
!"#
%
! $ %
F
! &'(
'
"
*.
)*+,-. /0123 45 )*
'GGGHI
#
'J
6789:; <=>?; @ ! 6A B6
'KFII)
$
?@ ! C DE F
!"#
GH I J KL MN OP QR ST U V W X Y Z ! [ \] ^ _ ` a b c d e f g hi j V k l
!"#
mnohp qrs!trsu b cde f g va i j wx h y z{ | } !~i j m n 0 V ; I !
klmn FSU V WX%
LM/NMOPQ"LRN"ST
!D] ! K !tr s 0
S &X{O %
ABC!
!"#
# ij Vkl# bcd eg#
DEFGH!
/SIF
IJKL M !
M
INOH
! KUGV!U')U
"
'IKV
%
IUCII'GCI)
'() *++,-). /)0)*/1( 23 -45),,-6)45 $%& 1245/2,,)/ -4 5() -405/78)45
WXR Y,?"201?-
K
!
ZR [;7
F
!
!MS\ T1"D;?-
F
$
%. &'()' *+',- .&'(/ 0 1.( 2'(# 3.4
!
&56
!
&'()' FGGGII
!
78'(-
&
F. 6#9-1:;#(: .< =>#!:1.('! 0(<.1;-:'.(
!
?'-(/@+ A('B #1@':) .< C!'#(!# -(D 5#!8(.>./)
!
E8#(F'-(/ F%FII)
!
38'(-
%
9:05/*15; "? 30,2 =;=14
!
D1 =47=721 ; ?1D <12,-? 874 301 8599: !"# 67?347@@14 B;21< 7? 2,?-@1"@;:14 ?154;@ ?13D74E 37 27@>1 301
=47B@1A
!
,? D0,60 ,3 ,2 <,88,65@3 874 301 34;<,3,7?;@ !"# 67?347@@14 ,? 301 ,?2345A1?3 37 ;60,1>1 ;6654;31 =;4;A1314 21@8"35?,?-.
/0,2 <12,-? ;==@,12 301 2,?-@1"@;:14 ?154;@ ?13D74E 37 301 123;B@,20A1?3 ;?< 41;27?,?- 78 301 8599: 47@12
!
A;E,?- 301 8599:
67?347@@14 7D?,?- 301 21@8"@1;4?,?- 85?63,7?. Q7 ,3 B10;>12 B13314 ,? ;60,1>,?- ;6654;31 =;4;A1314 21@8"35?,?- ,? ; 67A=@1]
2:231A. Z1 =14874A 301 2,A5@;3,7? B: LM/NMOPQ"LRN"ST =@;3874A
!
;?< 301 2,A5@;3,7? 4125@32 207D 30;3 30,2 <12,-? 0;2
B13314 47B523?122
!
23;B,@,3: ;?< 41;@"3,A1.
<)= >2/.0; !"#
#
8599: ;<;=3,>1
#
2,?-@1"@;:14 ?154;@ ?13D74E
#
2,A5@;3,7?
PQ R S!
FI%)CI^CIK
QTOH!
FIK)I^IFK
UV W X!!""
K_^)
'$!!45¡¢!£¤¥% r¦(<§V¨©%
YZ[9\]
`@16347?,6 #12,-? `?-,?114,?-
÷
FF
ø
a7@.FF
÷
U
ù
S7.U
FIKV
ú
)
û
L;4. FIKV
!FG!
下载后可阅读完整内容,剩余3页未读,立即下载
299 浏览量
510 浏览量
145 浏览量
2025-02-25 上传
2025-02-25 上传
2025-02-25 上传
2025-02-25 上传
2025-02-25 上传
2025-02-25 上传
2025-02-25 上传

weixin_38715772
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- MakeCode项目教程:new-fall-guys-8-bit-v80
- JavaScript实现剪刀石头布游戏解析
- LabVIEW制作中国象棋游戏实例教程
- MD5_Check与SUN_MD5Check:文件完整性校验工具解析
- 西门子SITRANS LG240探头操作与维护手册下载
- 免费下载 HelveticaNeueLTStd-Roman 字体文件
- lambdex:扩展Python lambda功能实现多行代码执行
- 深入理解前端算法:JS版剑指offer题解全解析
- HiJson - 高效Json格式化与多标签操作工具
- 传智播客Android智慧北京第4日视频教程
- 李春葆《数据结构教程》实验题答案解析
- 西门子SITRANS LG270探针操作与维护指南
- 掌握theposhery-devcontainer:开发顶级容器的简便方法
- 基于MERNG堆栈开发的Sick Fits网络商店介绍
- Qt4全面教程:图形设计与嵌入式系统开发
- Braspag GitHub站点:API文档与FAQ全解析
