正运动ZMC406网络运动控制器用户手册详解:6轴控制与接口特性
需积分: 0 17 浏览量
更新于2024-06-25
收藏 4MB PDF 举报
正运动ZMC406控制器用户手册是正运动技术公司推出的一款高性能多轴运动控制器,专为需要复杂连续轨迹控制的场景设计,如机器人、电子半导体设备、点胶设备、印刷包装等领域。该控制器的核心特性包括:
1. **多轴控制能力**:ZMC406支持6轴运动控制,能够满足高精度和多维度的运动需求。
2. **脉冲输出模式**:提供多种脉冲输出选项,如脉冲/方向、双脉冲或正交脉冲,适应不同应用的运动控制需求。
3. **高速性能**:每轴最大输出脉冲频率高达10MHz,确保了高速运动的响应速度。
4. **IO扩展**:支持ZCAN和EtherCAT扩展IO,最多可扩展至4096个输入和输出端口,便于设备连接和扩展。
5. **接口丰富**:具备 EtherCAT、RS232、RS485、USB和以太网接口,方便数据传输和远程控制。
6. **灵活配置**:轴正负限位信号和原点信号口可以灵活设置为输入,通用数字输出口支持大电流输出,可用于驱动电磁阀。
7. **软件支持**:手册提到需参考ZBASIC软件手册获取控制器软件的详细资料和指令介绍。
8. **版权与安全警告**:用户手册受版权保护,未经许可不得复制或抄袭。在使用过程中,必须遵守安全注意事项,如正确接线、安装和调试,以防止设备损坏和人员伤害。
9. **手册更新**:V1.5版手册新增了型号信息、接口规格、网口说明、扩展模块资源映射和编程软件使用方法等内容,以及更全面的安全警示和运行维护指导。
在安装和使用ZMC406控制器时,用户应遵循严格的步骤,确保在安全环境中操作,例如断开电源、避免在有灰尘、油烟等易损环境或极端温度下使用。手册还强调了法律责任归属,即若因违反手册内容或操作不当导致事故,正运动技术公司不承担法律责任。
ZMC406运动控制器凭借其强大的功能、丰富的接口和严格的使用规范,是工业自动化和精密控制应用的理想选择。在实际操作中,用户应确保充分理解和遵守手册中的所有指南,以保障设备安全和高效运行。
ZMC406 运动控制器用户手册 V1.5
4
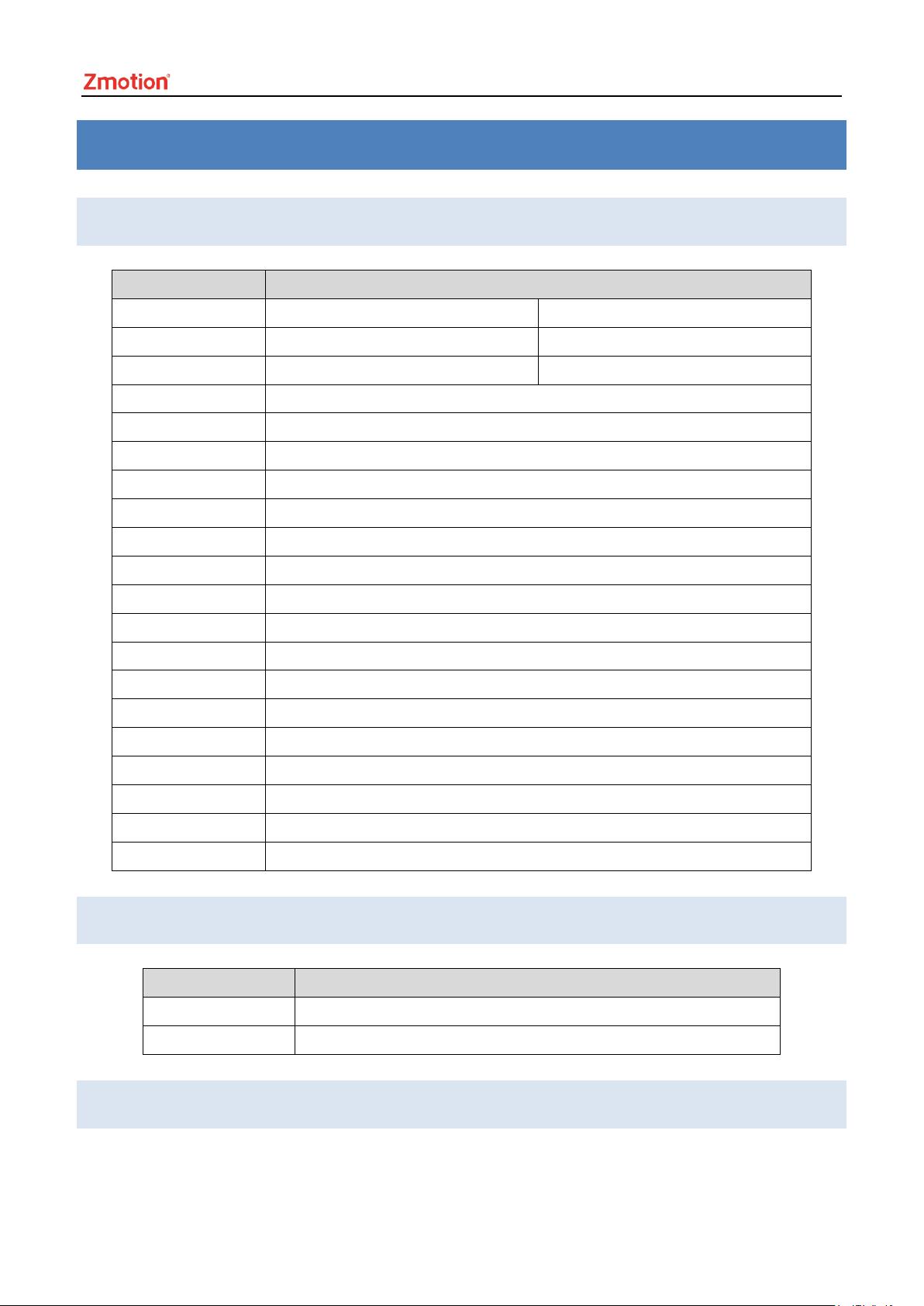
第二章 产品规格
2.1 基本规格
项目
描述
型号
ZMC406
ZMC406R
基本轴数
6
6
最多扩展轴数
32
32
基本轴类型
EtherCAT,6 个本地脉冲轴
数字 IO 数
24 路输入,12 路输出,每个脉冲轴有 1 路输入和 1 路输出
最多扩展 IO 数
4096 路输入,4096 路输出
PWM 数
4
AD/DA
通用 DA 有 2 路,0-10V
最多扩展 AD/DA
1000 路 AD,1000 路 DA
脉冲位数
64
编码器位数
64
速度加速度位数
64
脉冲最高频率
10MHz
每轴运动缓冲数
4096
数组空间
320000
程序空间
32MByte
Flash 空间
256MByte
电源输入
24V 直流输入
通讯接口
RS232,RS485,以太网,U 盘,CAN,EtherCAT
外形尺寸
205mm*135.25mm
2.2 订货信息
型号
规格描述
ZMC406
6 轴,点位,直线,圆弧,电子凸轮,连续轨迹运动,机械手指令。
ZMC406R
全功能加上蜘蛛手和 6 关节机械手指令支持。
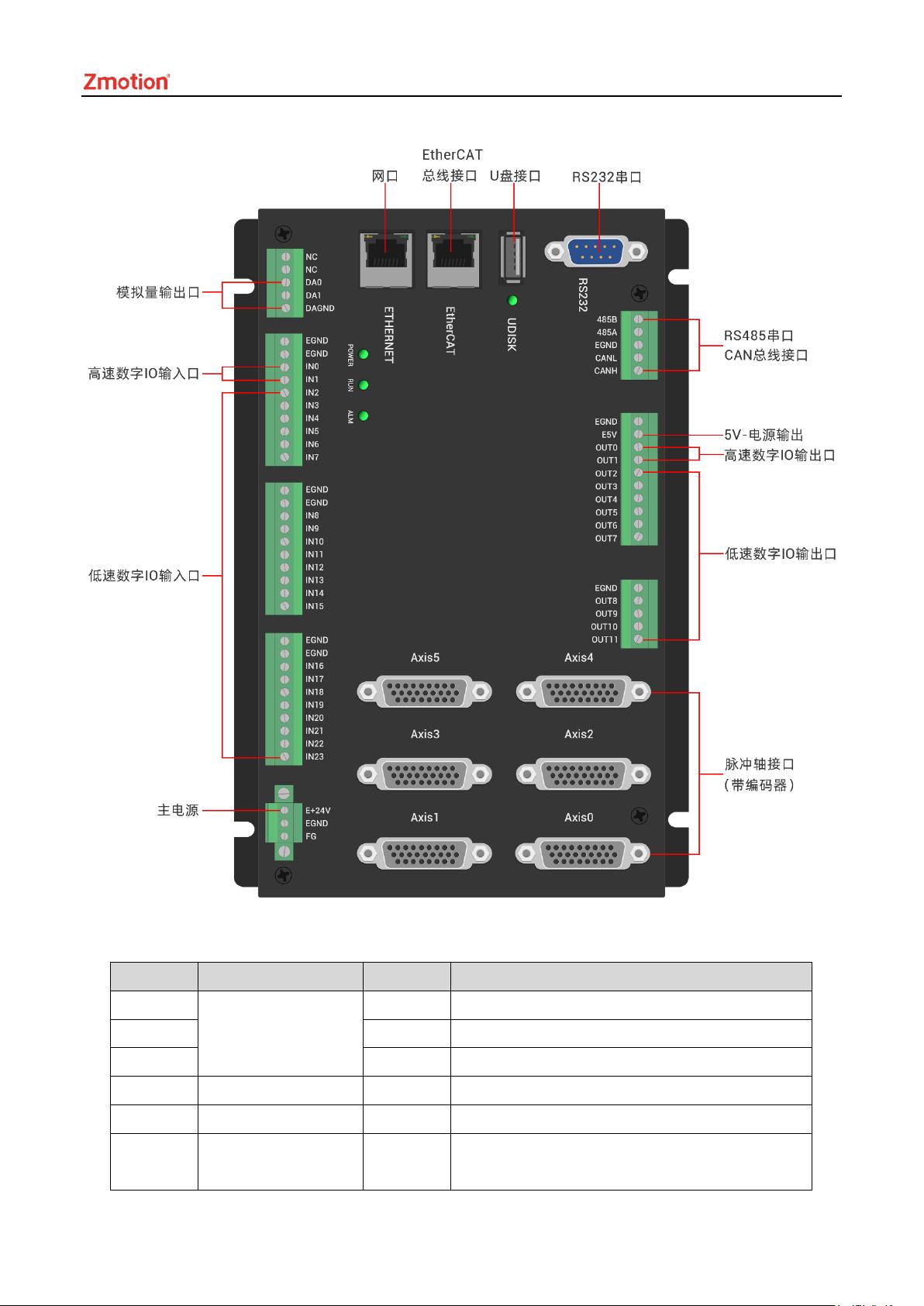
2.3 接口定义
剩余47页未读,继续阅读
2023-04-15 上传
2023-04-21 上传
点击了解资源详情
2023-05-12 上传
2023-06-07 上传
2023-05-31 上传
2023-04-17 上传
2023-05-24 上传
2023-06-09 上传

正运动技术
- 粉丝: 3181
- 资源: 53
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
