模糊自适应滑模控制在功率放大器中的应用与优势
154 浏览量
更新于2024-08-31
1
收藏 957KB PDF 举报
"模糊自适应滑模变结构控制及其在功率放大器中应用"
本文主要探讨了一种创新的控制策略——模糊自适应滑模变结构控制方法,并将其应用于功率放大器的控制中。这一方法旨在解决传统滑模控制的动态响应性能不足、总谐波畸变率高以及鲁棒性差的问题。同时,它还通过引入模糊自适应理论来减少滑模控制中的抖振现象。
滑模变结构控制是一种基于切换函数的控制技术,其优势在于能够快速地使系统状态到达预设的滑动模态,从而实现对系统性能的高效控制。然而,传统的滑模控制存在抖振问题,这可能影响系统的稳定性和精度。为了改善这一点,本文提出了模糊自适应控制机制。模糊自适应控制器由四部分组成:模糊化、规则库、模糊推理和反模糊化。其中,模糊化是将输入数据转化为模糊集合的过程;规则库包含了一系列控制规则,用于指导控制决策;模糊推理根据规则库中的规则对输入数据进行处理;而反模糊化则是将模糊输出转化为实际控制信号的过程。
为了解决学习算法收敛速度慢的问题,文中选择了特定的模糊基函数作为模糊自适应控制函数。通过对非线性函数进行一系列基函数展开,系统可以根据参考值与反馈输出之间的误差来不断调整基函数的权重,从而实现学习和自适应控制。这种自适应能力使得系统能够适应参数变化和负载扰动,增强了鲁棒性。
通过仿真和实验,该控制策略展现出了良好的动态和静态性能,对系统参数和负载扰动具有很强的鲁棒性。具体表现为总谐波畸变率降低,动态响应性能提升,且控制过程更加稳定,减少了不必要的抖动。
总结来说,这篇研究介绍的模糊自适应滑模变结构控制策略为功率放大器的控制提供了一个更优的解决方案,它结合了滑模控制的快速响应特性和模糊自适应控制的自学习与鲁棒性,克服了传统方法的一些缺点,提高了系统的整体性能。这一成果对于电力电子设备的控制领域具有重要的理论和实践意义。
!
!"
# $ % & ’
"#
!
"$%&’ ()*+,-,&’
"
( ) * + ,
-./0123%4
#
567’1 89:;
$
<=
> ? @ A B C D E F . G H # I % 4 ’
!
J K C
"(
"%
LMN OPQ R STU V
%
#IWXYZ
%
[
\]^_‘ab cde
&&
&
B f g
’
.
(
%
h ij<k
AlmInBoI
)
pqr
%
stuv wxyz{
|%l’
!
)*)}
"(
"%
~*}’(w
nSfg
%
LM.
!
"/0
"
FoI
1! !
<
)
%
*}m%
^%lzl
#
oIBnD*
%
?
(¡¢Uab£¤
%
¥¦§¨©ª «¬
® ¯ °
)
± , §
"23
ª²D³´µ ¶ · ¸
¹
%
Eº»¶CD¼_D>*
%
[\½¥./+,¾
z¿ÀÁ4§mI%4’§¹
%
ÂÃÄMź Æ
ªºÇ½ÈÉcÊnË,ª«¬cdeEÌy
cOÍÎ|cGÏÐ¥ÑÒG¿¢Uª«¬
)
ÒG¿¢Uª
40546
!
4+,7,89 0$7& 5:’,:;+&
4<’=><=’& 6$8<’$+
"
MOͽÓÔc®KCª:‘
’
?"@
(
)
(¨©ªcÕ¿Ö×-
%
+,¢U<ØÙ Ú
cÛ¶<Ü¿ c : Ý
%
^ ާ߿%
à F+,á
âɧһG¶ãäå»
)
Nº¾z¿À
#
¤æç
»<è+, §½ÈÉ ^ éê§ë ìC
%
[\^
íîïÑ
#
_ð+,(Kñòn óôõö ÷ø ù
’
A " B
(
)
úM
%
40546
^d e
’
C
(
%
¦ûüÛ¶ý O
Í¿VþOÍ
%
Q/ÿC!.
%
ûüw§"n
#"£<èÛ¶$%§&’(h)*(+Ò§
Ò»G¶,-O./01§23
)
ÂÃ4GÏÐ
¥Ñª!
5¨© ª-
%
ºõ6m %+,§½È
ÉCh789(K:;
%
<4:;¢= >9GÏ?
ô
%
õ@ ÒGû üª §:An B C
%
D Z +
, ( Ö Ò G K §
E F î ¸
%
ý ØÂ G H+
,§23
)
D
mI%4+,§z:G|
m I %4’§@T ¡ ¢ U < è N §I y J
KnLMNO
D
PQ
’
E
(
%
ÂÃRSºÇM
"/0
T¿’nJKU§¤©ª
)
VT¿’nJK©W) XY Vƪ© W
!
(Z
G Ö × - [½ X Y G H ç »
!
"%
< k \ O . ^
"/0
T¿+,§Û¶:×
*
7 !
"
7 #
F G
D
"
!
$ $
%
&’&
%
H &
"
"
!
"
G
I
"
&
&’&
%
(
%
H
)
!
*
+
,
7 (
%
7 #
F
.
%
&
& ’ &
%
!
*
G
.
%
.
& ’ &
%
(
%
!
.
"
)
J
F
& &
%
&’ &
%
!
*
H
!
&
& ’ &
%
"
(
%
!
I
"# $ %&’ ()*+ ,-./ 0
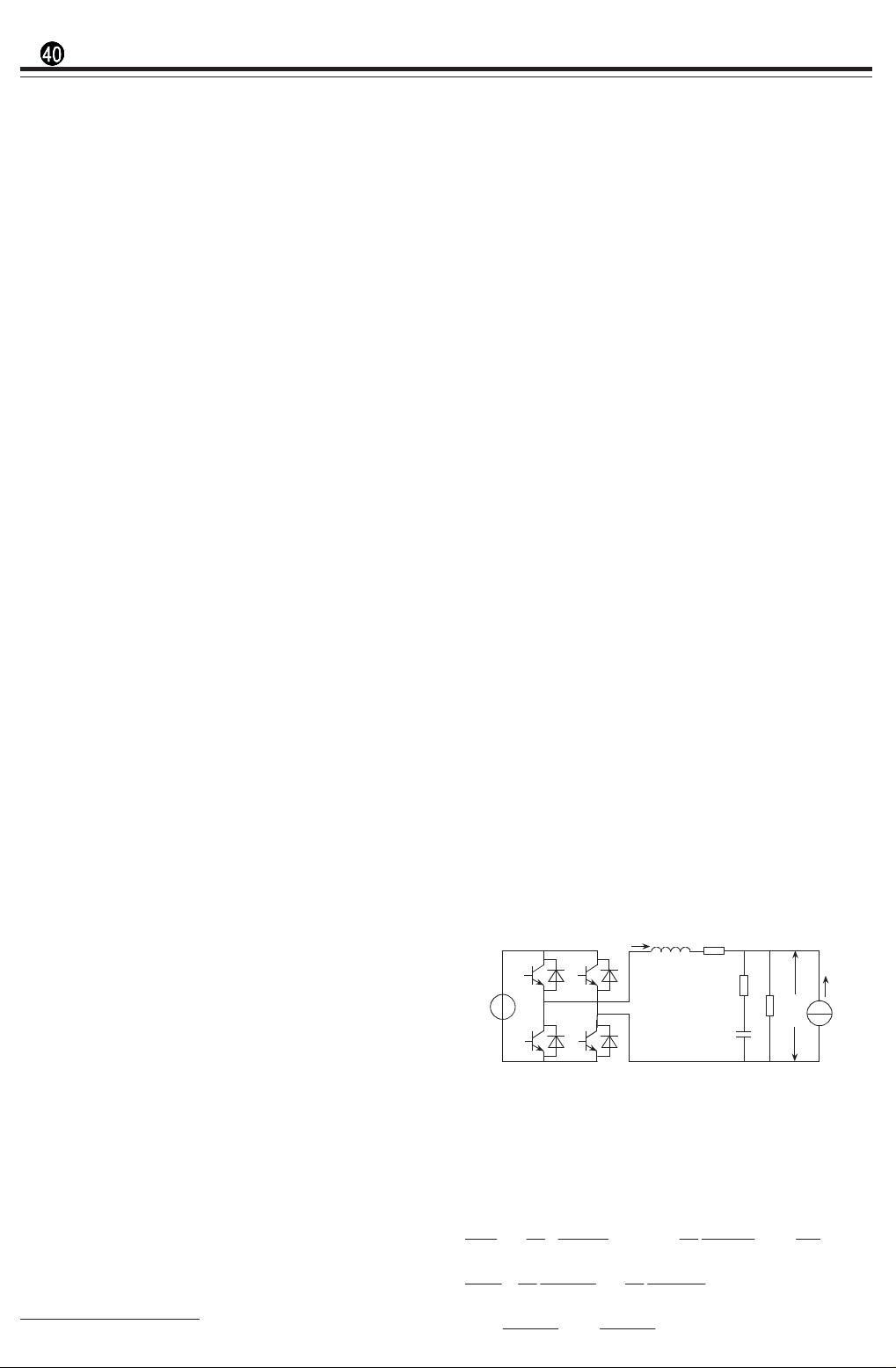
K,9LI M$*$+$9,>:+ N<’=><=’& $- *$%&’
:)*+,-,&’ :87 -,+<&’ >,’>=,<N
H
G
)
J
)
!
*
&
*
&
%
&
%
!
GH
ç»
H
G
!
*
12
!
!"#$%&’()*+,-./01234,
!
56789’:;<=>?@’A<B
CDEFGH
"
IGHJKLMNOPA<EF’QR
!
STPUVEFGHWXY@Z[J\
#
]^_‘B2a4
#
bcZdefg
!
hijklmP<=>?@no
!
pqPA<rCDEFG
HstuvEFwxytz{
"
<=>?@EF,|<=}
#
~
#
<=n<=}
A
M
"
H’<=k<=>?@F
!
Z
t
!
¡¢£ ¤7 ¡¥ ¦ §
!
¨©ª« ¬ ®¯ °± t²d³ ´µ¶
t·
!
¸h¹º’»’
"
¼½¾¿ÀÁÂÃIEFÄÅ¡¢ªÆÇÈWÉÊËÌ’
bcZ
!
¡¢W
#
ÍXZ[Î\
"
345
!
A<BÀDEF
$
<=>?@EF
$
z{
$
Ï234,
6!789
!
M" OC@
H
L A
:;<=>
!
(
:?@A
!
#$$% & %$’(
"
)**B
#
*E + $$AJ & $P
! " # $ % & ! ’ ( ) * +
, - . / 0 1 2 3 4 % 5
Ð Ñ
I
!
?
!
Ò Ó
?
!
ÔÕÖ
?
%
IL
×ØÙÚÛ}ÜÝÞ ß*à
!
×
?JJI@C
$
?L
×á¨â *ãÜä¡
!
×
?JJ?AJ
&
BCDE
!
)$$P & IJ & ?E
+
FGDE
!
)$$P & I? & ??
! " # $ % & ’
,-./012/ 345.1 670489024: ,;72<8.:0
=4->)B ?4@E
(=9L )$$B
H
)B
IH
E
E
)$$B
J
E
K
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
下载后可阅读完整内容,剩余4页未读,立即下载
2022-07-14 上传
2009-05-10 上传
2021-09-30 上传
2017-08-04 上传
2021-09-20 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38625164
- 粉丝: 4
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
