Python非线性数字滤波详解:从入门到实践
需积分: 9 2 浏览量
更新于2024-07-18
收藏 5.75MB PDF 举报
《使用Python进行非线性数字滤波:入门指南》是一本由Ronald K. Pearson和Moncef Gabbouj合著的专业书籍,于2016年由CRC Press出版。本书深入介绍了如何在Python编程环境中应用非线性数字滤波技术。非线性滤波是信号处理领域的一个重要分支,它不同于传统的线性滤波方法,能够处理更复杂的数据模式,如噪声、非平稳信号以及系统非线性特性。
在Python中实现非线性滤波,读者将学到如何利用该语言强大的数据处理能力和灵活的数学库(如NumPy和SciPy)来设计和实现各种滤波器,如自适应滤波、小波分析、神经网络滤波等。书中涵盖了以下关键知识点:
1. **非线性滤波基础**:首先,读者会理解非线性滤波的基本原理,包括其与线性滤波的区别,以及非线性滤波器的分类,如基于模型的方法、基于实例的方法和基于优化的方法。
2. **Python环境准备**:介绍如何在Python环境中设置必要的工具包,如导入所需的模块,如numpy用于数值计算,scipy用于信号处理,以及机器学习库如sklearn用于构建非线性滤波器模型。
3. **自适应滤波器**:通过实例展示如何使用Python实现自适应滤波器,如Kalman滤波器和粒子滤波器,它们能根据数据实时调整滤波参数,提高滤波性能。
4. **小波分析**:介绍小波变换在非线性滤波中的应用,讲解如何使用Python库如PyWavelets来分析信号的多尺度特性,并进行去噪和特征提取。
5. **神经网络滤波**:讲解如何利用Python的深度学习框架(如TensorFlow或PyTorch)构建神经网络模型,用于信号处理任务,如时间序列预测和异常检测。
6. **案例研究与实践**:书中提供了实际项目案例,展示了如何将所学理论应用于实际问题,例如图像处理、语音识别或金融数据分析中的噪声去除。
7. **性能评估与调试**:讨论如何评估滤波器的性能指标,如均方误差、相位响应和动态范围,以及如何调试和优化滤波算法。
8. **版权和版权声明**:强调了书中的内容版权归属,并指出该版本的更新日期以及国际标准书号(ISBN)。
通过这本书,读者不仅能掌握Python非线性数字滤波的理论,还能在实践中熟练运用这些技术,从而提升数据处理和信号分析的能力。无论是在学术研究还是工业应用中,这都是一份不可或缺的学习资料。

i
i
“knitrMainBook” — 2015/8/20 — 17:01 — page 2 — #18
i
i
i
i
i
i
2 CHAPTER 1. INTRODUCTION
that provides excellent support for computational linear alge-
bra, with a vast range of add-on packages that support many
signal processing tasks. Why, then, are we advocating Python
instead of MATLAB? A more detailed discussion is given in Sec.
1.4, but the short answer is that Python is an open-source lan-
guage, freely available to anyone, while MATLAB is a commer-
cial product that must be purchased. As a consequence, there is
significant interest in the scientific and engineering communities
in taking advantage of—and contributing to—the growing sup-
port for numerical computations in Python [94]. Second, unlike
MATLAB, which evolved from a linear algebra-centered start-
ing point, Python is a general purpose programming language,
useful in a much broader range of applications. Finally, because
of this broader focus, the Python language offers greater support
for reproducible research, an important idea discussed further in
Sec. 1.4.
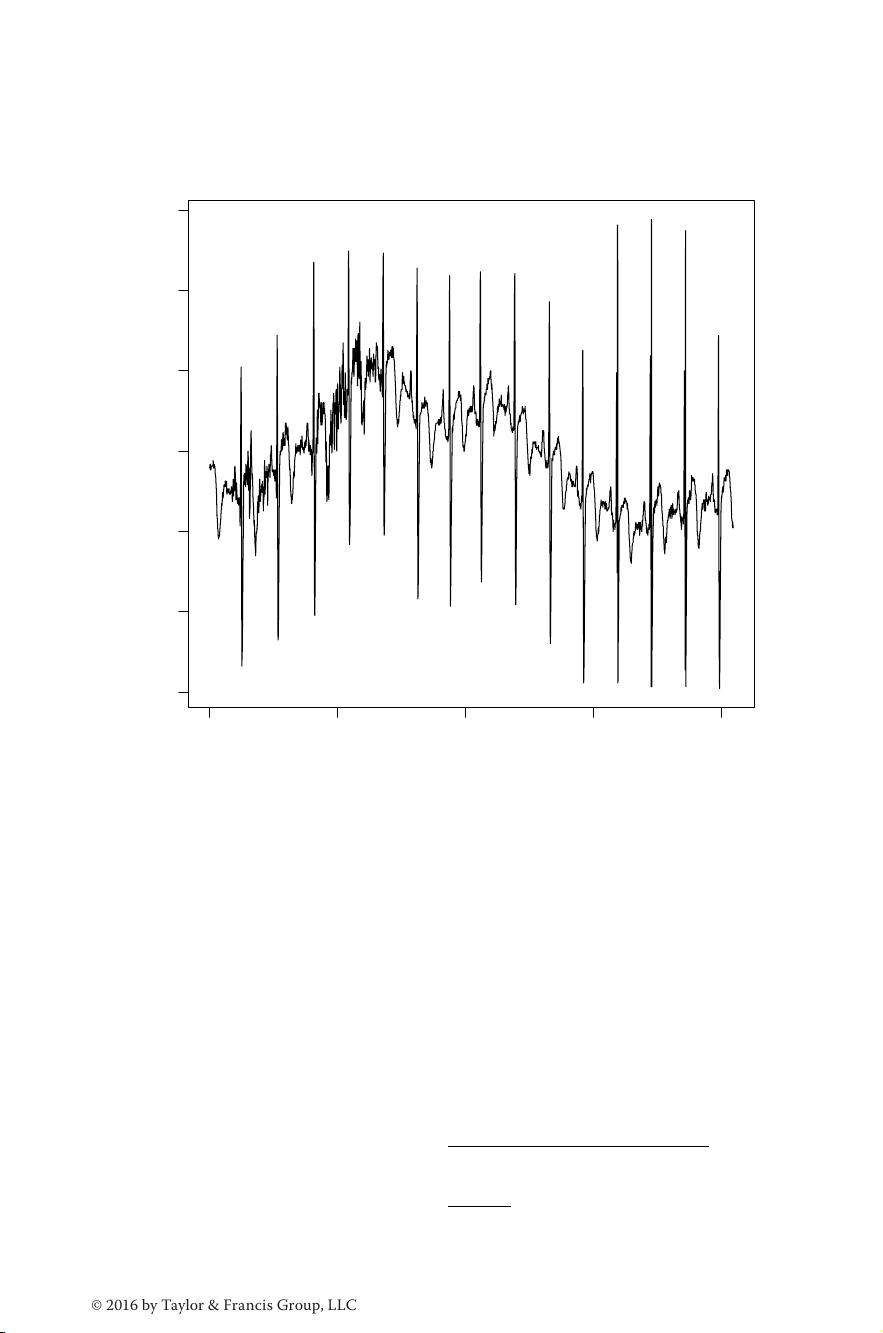
1.1 Linear versus nonlinear filters: an example
Many of the central ideas of this book are illustrated with the following simple
example. Fig. 1.1 shows a sequence of 2048 successive measurements of an elec-
trocardiogram (ECG), an electrical signal measured in millivolts and sampled
180 times per second. This example illustrates the kinds of large-magnitude
“spikes” that can appear in a real data sequence, potentially obscuring other
important details. This particular data sequence is available as part of the ade4
add-on package [29] for the R software environment [99]. Like Python, R is an
open-source software package, developed to support a wide variety of statistical
and data analysis procedures and discussed further in Sec. 1.4. The ECG dataset
considered here is available as the object ecg, and the description available from
the R documentation notes that the signal exhibits a variety of biologically sig-
nificant components on different time scales, including a relatively long-term
baseline drift due to breathing artifacts, movement artifacts, and identifiable
components of the heart rhythm, including an occasional arrhythmia. The doc-
umentation also notes that this data sequence was provided by Gust Bardy and
Per Reinall of the University of Washington, and it cites the book by Percival
and Walden for further discussion [93].
Mathematically, the ECG signal shown in Fig. 1.1 corresponds to a finite
sequence of real numbers {x
k
}, where the sequence index k runs from a minimum
value of k = 1 to a maximum value of k = N where N = 2048. All of the digital
filters considered in this book correspond to a mapping of one sequence of length
N, say {x
k
}, into another sequence, say {y
k
}, also of length N. Most—but not
all—of these filters may be expressed as:
y
k
= F{x
k
} = Φ(x
k−K
, . . . , x
k−1
, x
k
, x
k+1
, . . . , x
k+K
), (1.1)
for some nonnegative integer K and some function Φ(·) that maps 2K + 1
© 2016 by Taylor & Francis Group, LLC


剩余298页未读,继续阅读
点击了解资源详情
231 浏览量
166 浏览量
2021-10-05 上传
2019-09-12 上传
276 浏览量
2021-05-16 上传
412 浏览量
点击了解资源详情

imyu37
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- HaneWin DHCP Server 3.0.34:全面支持DHCP/BOOTP的服务器软件
- 深度解析Spring 3.x企业级开发实战技巧
- Android平台录音上传下载与服务端交互完整教程
- Java教室预约系统:刷卡签到与角色管理
- 张金玉的个人简历网站设计与实现
- jiujie:探索Android项目的基础框架与开发工具
- 提升XP系统性能:4G内存支持插件详解
- 自托管笔记应用Notes:轻松跟踪与搜索笔记
- FPGA与SDRAM交互技术:详解读写操作及代码分享
- 掌握MAC加密算法,保障银行卡交易安全
- 深入理解MyBatis-Plus框架学习指南
- React-MapboxGLJS封装:打造WebGL矢量地图库
- 开源LibppGam库:质子-伽马射线截面函数参数化实现
- Wa的简单画廊应用程序:Wagtail扩展的图片库管理
- 全面支持Win7/Win8的MAC地址修改工具
- 木石百度图片采集器:深度采集与预览功能
