SPX1117:高效低压差稳压器在便携设备中的应用
"SP3222E/SP3232E是+3.0V至+5.5V RS-232收发器的数据手册和封装库,适用于通信接口设计。SPX1117是一款800mA低压差(LDO)稳压器,具有多种电压选择和保护功能,广泛应用于各种电子设备的电源管理。"
在电子通信领域,SP3222E和SP3232E是常用的RS-232收发器,它们工作在+3.0V至+5.5V的电压范围内,用于实现数字信号与模拟信号之间的转换,确保数据在长距离和不同电气环境下的稳定传输。RS-232标准是串行通信接口的典型代表,广泛应用于工业控制、计算机外设以及嵌入式系统中。这些收发器的特性包括宽电压范围支持,增强了它们的兼容性和适应性。
另一方面,SPX1117是一个低功耗、高效率的低压差线性稳压器,能提供0.8A的稳定输出电流,峰值电流可达1A。其独特的设计使得在0.8A负载时压差仅为1.1V,这意味着在低输入电压条件下仍能保持高效运行。该器件可选择的输出电压包括1.5V、1.8V、2.5V、2.85V、3.0V、3.3V和5V,适合多种电子设备的需求。此外,SPX1117具备低静态电流特性,有助于延长电池寿命。在负载电流减少时,静态电流会相应降低,进一步提高整体系统的效率。
SPX1117适用于多种应用场景,如PC桌面服务器、SCSI-II有源终端、便携式电脑、无线电话、充电设备、磁盘驱动器、便携式消费类电子产品、便携式仪器以及开关模式电源(SMPS)的后置调节。它提供了SOT-223、TO-252、TO-220和TO-263等多种封装形式,便于设计者根据实际需求选择合适的封装类型。为了保证稳压器的稳定性,通常需要一个输出电容,最小可采用2.2uF的陶瓷电容,而10uF的输出电容可以提供更佳的稳定性。
Dropout Voltage(压降)是指稳压器能够维持稳定输出电压所需的最小输入电压与输出电压之差。压降越小,电源效率越高,因为较低的压降意味着更少的能量损耗为热量。因此,选择低dropout的稳压器对于优化电源效率至关重要,尤其是在便携式和电池供电设备中,节省的每一点功率都有助于延长设备的工作时间。
SP3222E/SP3232E和SPX1117分别是RS-232通信和电源管理的重要组件,它们在现代电子设备中起着不可或缺的作用。了解并合理选用这些元件,可以提升系统的可靠性和效率。
广州周立功单片机发展有限公司 Tel: (020)38730976 38730977 Fax: 38730925 http://www.zlgmcu.com
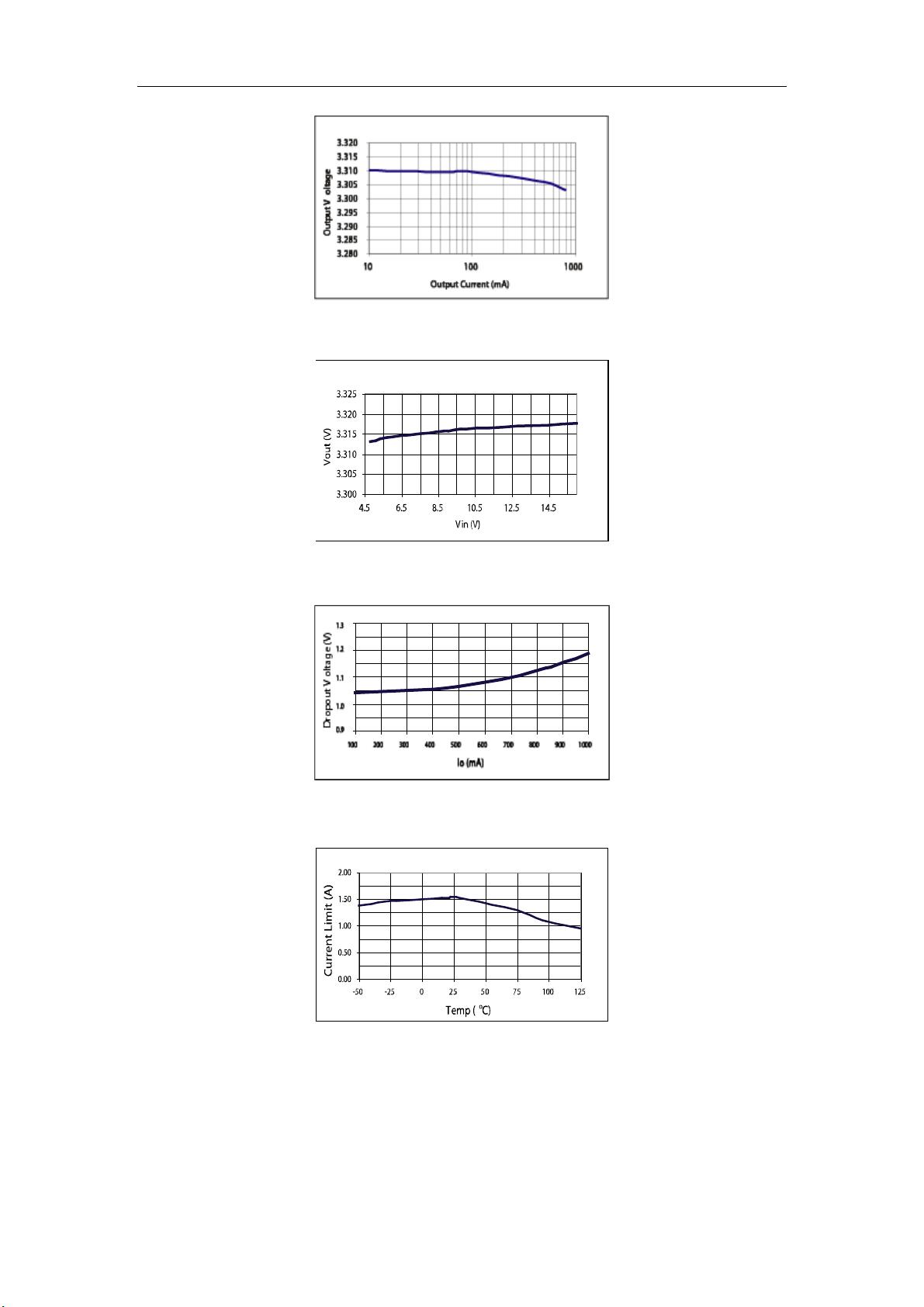
图 1 SPX1117M3-3.3 负载调节率;V
IN
=4.8V
图 2 SPX1117M3-3.3 线性调节率;I
OUT
=10mA
图 3 SPX1117M3-3.3 压差 vs 输出电流;V
IN
=4.8V,C
OUT
=2.2uF
图 4 SP1117M3-3.3 的电流极限值;VIN=4.8V,CIN=COUT=1uF,IOUT 从 10mA 到电流极限值
4
剩余15页未读,继续阅读
188 浏览量
2109 浏览量
1314 浏览量
110 浏览量
188 浏览量
627 浏览量
291 浏览量
点击了解资源详情
181 浏览量

ligirl
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 酒店申报住宿登记制度
- SWTableViewCell(iPhone源代码)
- libdvid-cpp:用于访问 DVID 的 REST API 的 C++ 库
- Goodreads Half-Stars and Rating Tags-crx插件
- flex-blog:Projeto de site do curso da OrigamID feito com CSS flex box
- matlab开发-拉普拉斯随机数发生器
- activiti_designer需要额外插件JAR包.zip
- main:这将是与2019年Spring软件工程课程有关的所有内容的主要回购
- vscode windows 10 64位安装包
- aScopy-开源
- 酒店环境管理手册范例范例
- Carmen Sandiego HD Wallpapers Tab-crx插件
- jct-discord-bot:JCT ESP Compsci Discord的Bot
- jdk arm 32 压缩包
- Gator-Enterprise.github.io
- SmartControl:我的第一个Android应用,涵盖所有内容
