YRC1000 INFORM 命令与制御指令详解
需积分: 19 172 浏览量
更新于2024-07-16
收藏 16.6MB PDF 举报
"这份文档是YRC1000 INFORM的说明书,涵盖了该机器人的输入输出命令和控制命令的详细解释。文档旨在确保最终用户能够理解和安全地使用YRC1000。"
YRC1000是安川电机制造的一款机器人,INFORM是其编程语言,用于控制机器人的动作和逻辑。本说明书详细介绍了INFORM中的各种命令,包括:
1. **入出力命令**:
- **DOUT**:输出指令,用于设置数字输出信号。
- **DIN**:输入指令,用于读取数字输入信号。
- **WAIT**:等待指令,让程序暂停直到满足特定条件。
- **PULSE**:脉冲指令,生成一个短暂的输出信号。
- **AOUT**:模拟输出指令,用于设置模拟输出信号的值。
- **ARATION**:角度输出指令,用于输出电机的角度信息。
- **ARATIOF**:比率输出指令,通常用于设置速度或位置的比例。
- **ANTOUT**:数字输出数组指令,可同时设置多个数字输出。
2. **控制命令**:
- **JUMP**:跳转指令,根据条件改变程序执行流程。
- **CALL**:调用子程序指令,允许程序模块化。
- **TIMER**:定时器指令,用于设定延时操作。
- ***(ラベル)**:标签指令,用于标识程序中的特定位置。
- **'(コメント)**:注释指令,用于添加说明性文本。
- **RET**:返回指令,结束子程序并返回到调用点。
- **NOP**:空操作指令,不执行任何操作。
- **PAUSE**:暂停指令,暂时停止程序执行。
- **CWAIT**:条件等待指令,等待特定条件满足后继续执行。
- **MSG**:消息显示指令,向用户显示信息。
- **INPUT**:用户输入指令,获取用户的输入数据。
- **ADVINIT**:初始化高级功能指令。
- **ADVSTOP**:高级停止指令。
- **PRINT**:打印指令,用于输出文本信息。
- **CLS**:清除屏幕指令,清理显示屏上的内容。
- **ABORT**:中断指令,终止当前操作。
- **SETUALM**:设置报警指示灯指令。
- **DIALOG**:对话框指令,用于与用户交互。
- **SWITCH**:开关结构指令,根据条件执行不同分支。
- **CASE**:情况选择指令,类似编程中的多分支选择。
- **DEFAULT**:默认分支指令,当所有条件都不满足时执行的代码。
- **WHILE**:循环指令,满足条件时重复执行一段代码。
- **FOR**:计数循环指令,用于基于计数器的循环。
- **IFTHEN**:条件判断指令,根据条件执行相应代码块。
- **ELSEIF**:附加条件判断指令。
- **ELSE**:否则分支指令,当前面的条件都不满足时执行的代码。
在使用YRC1000时,务必遵守安全规定,如详细阅读并理解说明书,不进行未经授权的设备改造,以及确保所有安全防护设施的完整。安全注意事项被分为“危险”、“警告”、“注意”和“通知”四个等级,用户应特别关注这些提示以避免潜在风险。如果出现损坏或丢失说明书的情况,可通过联系安川电机的代理商或指定营业点获取新的副本。
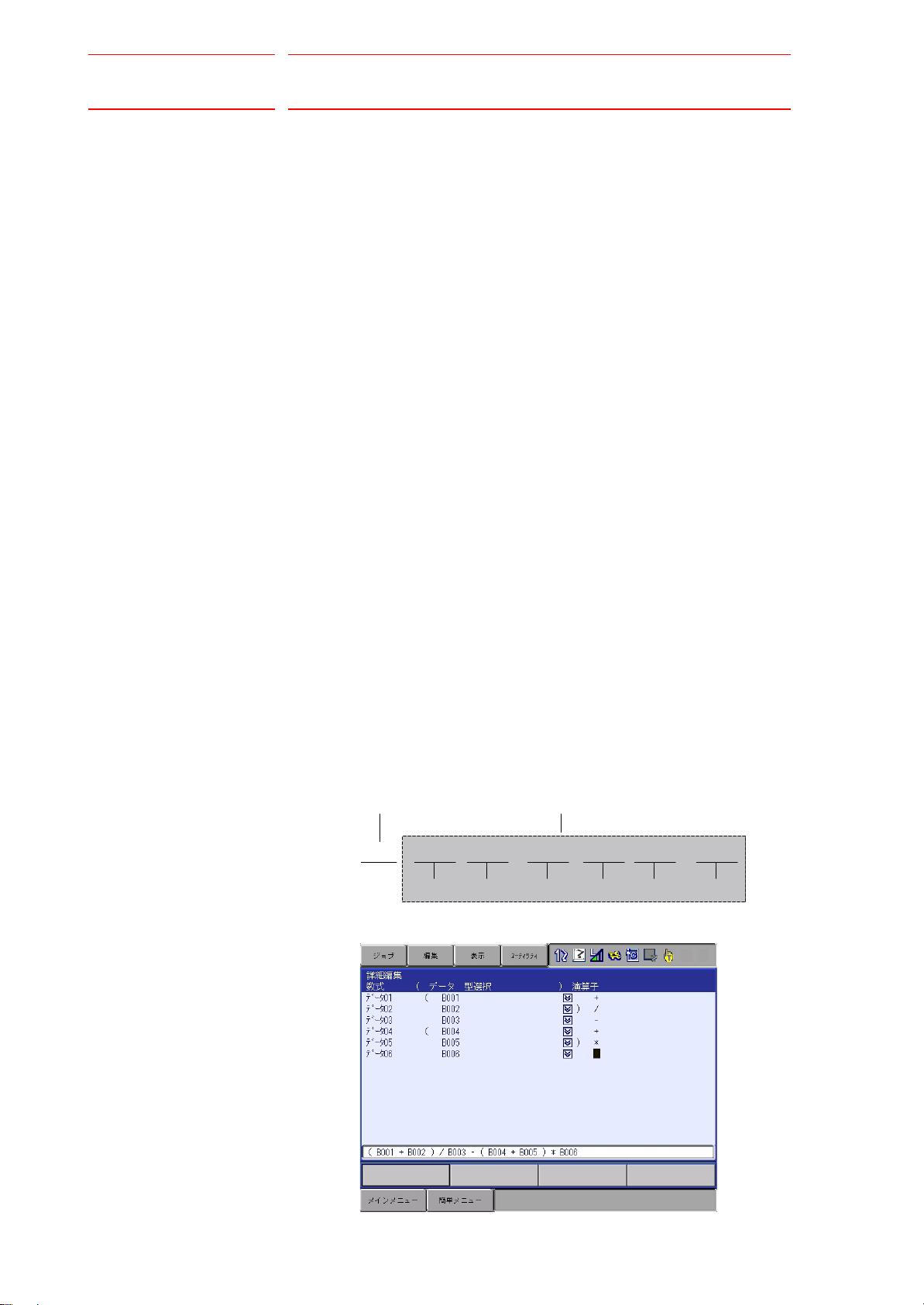
1 INFORM の概要
1.2 命令の登録
1-5
1.2 命令の登録
1.2.1 登録操作
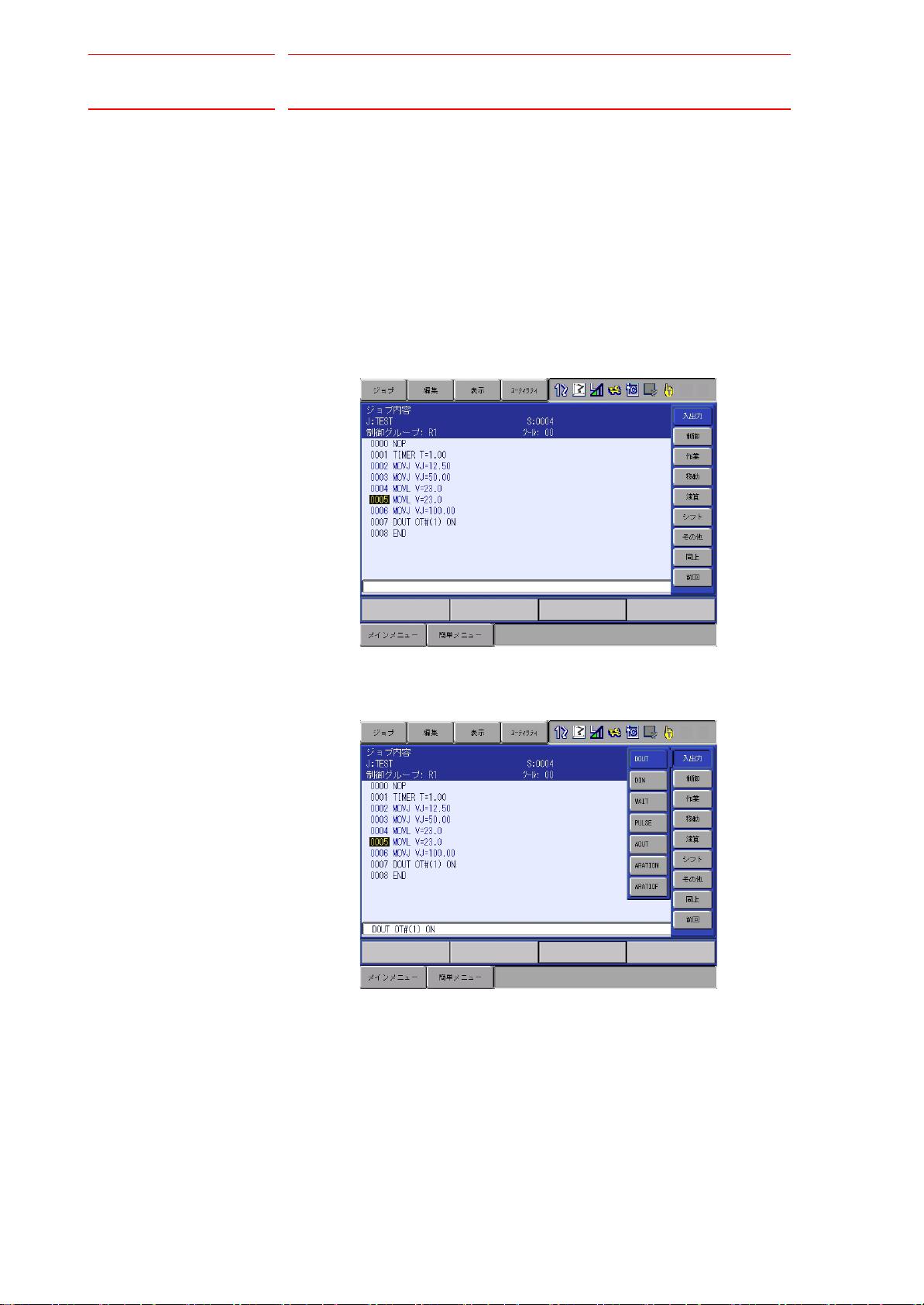
命令の登録は、ジョブ内容画面を表示中に[命令一覧]を押して行ない
ます。
1. メインメニューの【ジョブ】を選択
2. 【ジョブ内容】を選択
– ジョブ内容画面が表示されます。
3. [命令一覧]を押す
– 命令グループ一覧ダイアログが表示されます。
4. 登録したい命令の種類(グループ)を選択
– 命令一覧ダイアログが表示されます。
5. 登録したい命令を選択
– 入力バッファラインに命令が表示されます。
6. [エンタ]を押す
– 入力バッファラインに表示されている命令がジョブに登録され
ます。なお、ジョブの途中に命令を登録する場合は、[エンタ]
の前に[追加]を押します。
剩余397页未读,继续阅读
2020-08-15 上传
2020-04-17 上传
2023-09-19 上传
2023-10-20 上传
2023-07-02 上传
2024-01-20 上传
2023-11-10 上传
2024-01-08 上传

myeonguk666
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
