相机标定全攻略:MATLAB、OpenCV与Halcon方法解析
"这篇文档是关于相机标定技术的总结,涵盖了MATLAB的cameracalibrationtoolbox,OpenCV和Halcon三种不同的方法。作者强调了相机标定的重要性,并分享了个人使用的经验,旨在促进对相机标定过程的理解。"
在计算机视觉领域,相机标定是至关重要的一步,它能消除镜头畸变,获取相机内参,从而提高图像处理和三维重建的精度。以下是三种常用的相机标定方法:
1. MATLAB cameracalibration toolbox
MATLAB的cameracalibrationtoolbox是由Jean-Yves Bouguet开发的一个强大的相机标定工具。用户需要准备一系列含有已知几何形状(如棋盘格)的图像,然后手动或自动检测图像中的特征点。在这个例子中,作者使用了13张图片,每张图片上提取棋盘格的角点。经过“extractgridcorners”函数,用户可以标记4个边界点,系统会自动识别其余角点。输入棋盘格的实际尺寸和方格数量,工具会计算出相机的内参,如焦距(focal length)、主点坐标(principal point)和像素偏斜(skew coefficient)以及畸变系数。
2. MATLAB cameracalibrator
MATLAB后来推出的内置cameracalibrator工具简化了这一过程,提供了自动角点检测功能,使得标定更加方便。用户只需导入图像,工具会自动完成角点检测和标定。
3. OpenCV
OpenCV(开源计算机视觉库)也包含了一个相机标定的模块,同样支持自动角点检测。它的标定流程与MATLAB类似,但通常更适合C++或Python等编程语言环境。OpenCV的calibrateCamera函数用于计算内参和外参,同时提供校正畸变的功能。
4. Halcon
Halcon是一种工业级的机器视觉软件,其标定功能强大且适合自动化生产环境。Halcon提供了完整的2D和3D相机标定解决方案,包括多种标定模板和高级算法,能处理复杂环境下的标定任务。
在进行相机标定时,需要考虑的关键因素包括图像质量、标定物体的选择和放置、光照条件以及图像的多样性。标定结果可以应用于各种应用,如自动驾驶、无人机导航、机器人视觉和产品检测等。通过这些方法,可以提高图像处理的准确性和鲁棒性,减少由于镜头畸变带来的误差。
?,+=+6+7+A9+9++A9++:+@A+
7++99++++:
;!+,,,+,,+6+7+)9):
这里对这 个参数进行说明
(详见链接
, , )
()- 为焦距的像素尺寸,计算为 5?&,5?2,5 为几何焦距尺寸,?&B?2 为像元
尺寸。
() 为光心在图像坐标系下的图像坐标
() 倾斜系数,反映 & 和 2 像素轴的夹角
()= 畸变系数,这里有 个,前两个和最后一个为径向畸变,第三和第四个为切
向畸变,一般第五个为 ,切向畸变也很小
(),, 像素误差,可以看到这里小于一个像素尺寸
)
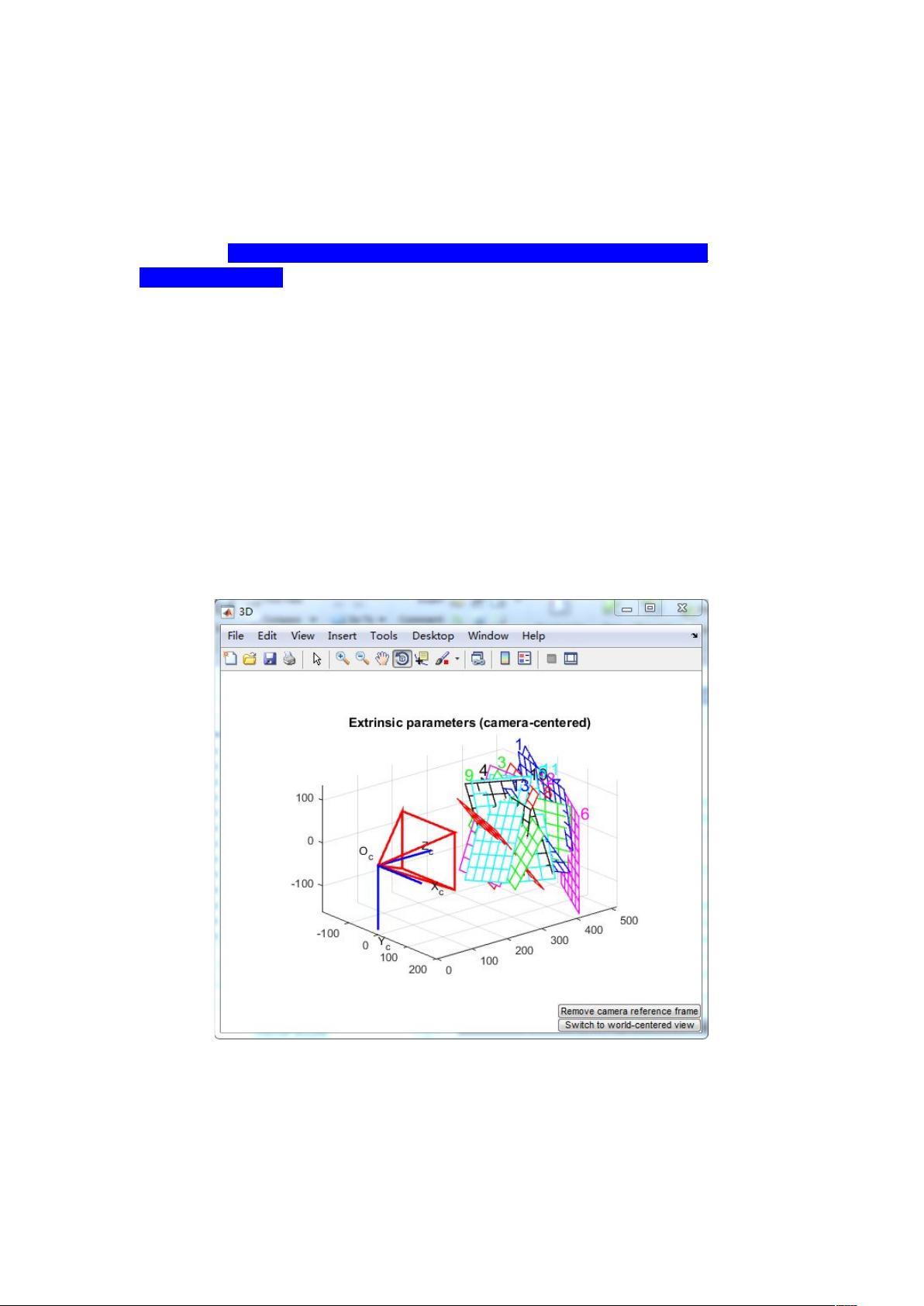
点击 +!,,得到相机和标定板的相对位置关系:
点击 ,,++ ,根据当前标定的结果和棋盘世界尺寸,得到投影到图像
上的角点图
剩余17页未读,继续阅读
2015-08-20 上传
168 浏览量
161 浏览量
2020-04-13 上传
点击了解资源详情
2024-05-30 上传
2008-05-23 上传

ersaijun
- 粉丝: 5740
- 资源: 31
 我的内容管理
展开
我的内容管理
展开







最新资源
- PMBOK2008中文版(项目管理知识体系指南第四版)
- ETL的考虑.doc
- datawarehouse心得
- .Net面试题 面试机理性东西
- css+div,绝对适合!!!!!!!!
- QOS随身手册.pdf
- 一个文档 - DIV+CSS布局大全
- 整数规划问题的遗传算法
- Real-time.Systems.Design.and.Analysis.Third.Edition
- Windows常用消息大全
- TestDirector中文使用手册第十二部分
- TestDirector中文使用手册第十部分
- Excel快捷键大全
- 跟我一起写makefile
- TestDirector中文使用手册第七部分
- ansys仿真实例(命令流,同时配有文字说明)
