MATLAB机器人工具箱实战:从坐标转换到动力学分析
下载需积分: 16 | PDF格式 | 896KB |
更新于2024-07-17
| 7 浏览量 | 举报
“matlab机器人工具箱演示matlabrobotics-toolbox-demo.pdf”是关于使用MATLAB进行机器人热仿真的一个详细教程,包含了多个关键概念和技术的演示,如坐标转换、轨迹规划、运动学正解、动画制作、运动学逆解、雅可比矩阵、逆向动力学以及正向动力学。
在机器人技术中,MATLAB是一个强大的工具,其Robotics Toolbox提供了一系列函数和算法,用于建模、分析和控制机器人系统。通过`rtdemo`命令,用户可以快速体验工具箱的功能,这通常会展示一个交互式的环境,用以演示各种机器人操作和计算。
坐标转换是机器人学中的基础概念,它涉及到位置和方向的表示。在MATLAB中,通常使用齐次变换矩阵来描述这种关系,因为它能同时表示平移和旋转。例如,`transl(0.5,0.0,0.0)`表示沿X轴的0.5米平移,`roty(pi/2)`表示绕Y轴90度的旋转,`rotz(-pi/2)`表示绕Z轴-90度的旋转。这些变换可以通过矩阵乘法进行组合。
运动学正解(forward kinematics)用于确定机器人的末端执行器在给定关节角度下的位置和姿态。这一部分的演示可能涵盖了如何使用工具箱中的函数来计算机器人的笛卡尔坐标空间位置。
动画(Animation)部分则展示了如何动态地模拟机器人的运动,这对于理解机器人行为和验证运动规划是非常有用的。
运动学逆解(Inverse Kinematics)则相反,它从目标位置和姿态反推关节角度。在实际应用中,如工业自动化或服务机器人,逆解常常用于规划到达特定位置的关节运动。
雅可比矩阵(Jacobians)是连接关节速度和末端执行器线速度的桥梁。这部分会介绍如何计算雅可比矩阵及其对机器人的运动控制的重要性。
逆向动力学(Inverse Dynamics)和正向动力学(Forward Dynamics)是机器人动力学的核心。逆向动力学用于计算给定关节速度和加速度时所需施加的力和力矩,而正向动力学则根据外力、关节力矩和机器人状态计算出运动。这两个概念对于设计机器人控制系统和进行动力学分析至关重要。
整个文档通过这些章节全面介绍了MATLAB Robotics Toolbox在机器人仿真中的应用,对于学习和实践机器人学的工程师或学生来说,是一个宝贵的资源。

%
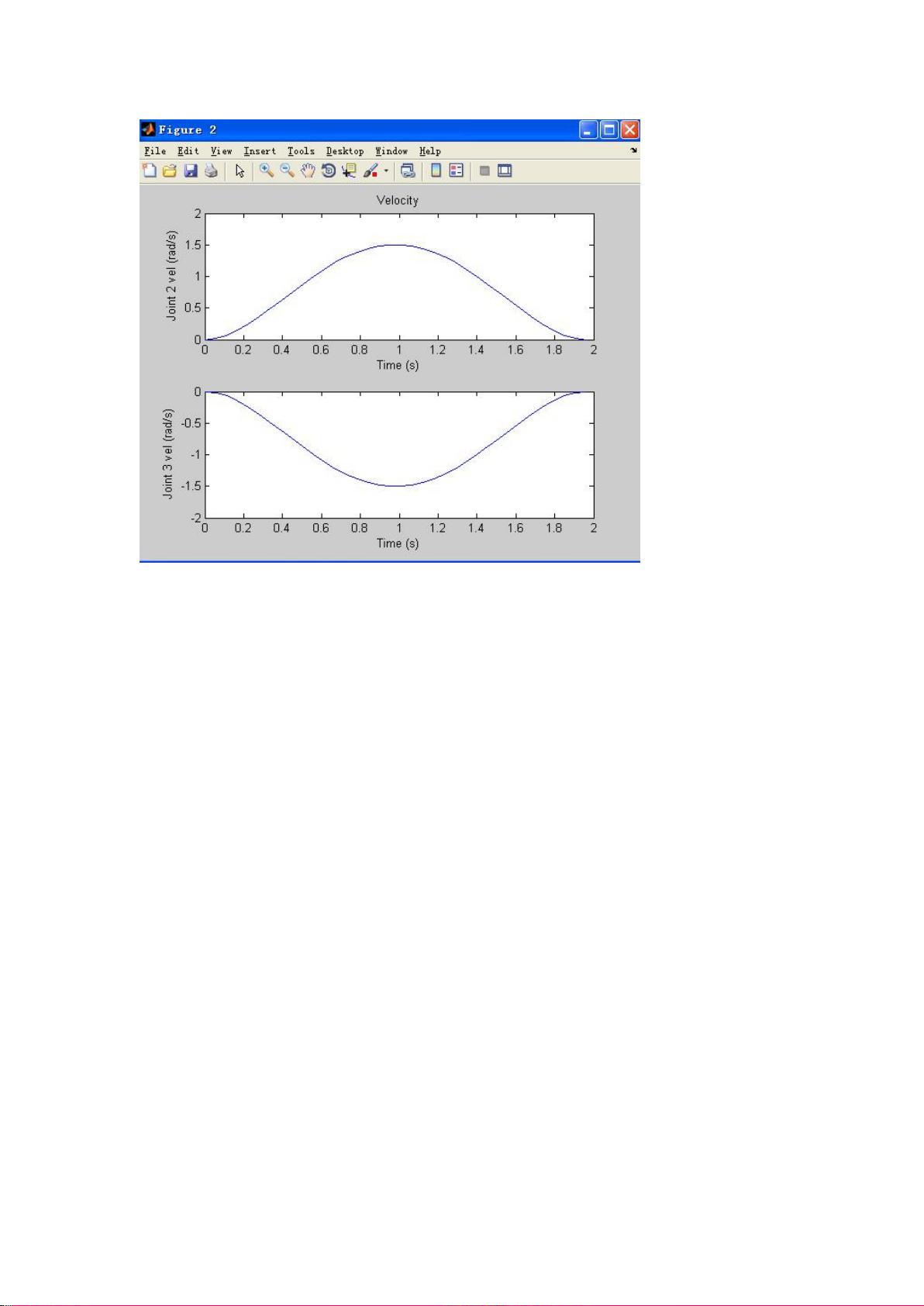
% We can also look at the velocity and acceleration profiles.
We could
% differentiate the angle trajectory using diff(), but more
accurate results
% can be obtained by requesting that jtraj() return angular
velocity and
% acceleration as follows
[q,qd,qdd] = jtraj(qz, qr, t);
%
% which can then be plotted as before
subplot(2,1,1)
plot(t,qd(:,2))
title('Velocity')
xlabel('Time (s)');
ylabel('Joint 2 vel (rad/s)')
subplot(2,1,2)
plot(t,qd(:,3))
xlabel('Time (s)');
ylabel('Joint 3 vel (rad/s)')
pause(2)
剩余54页未读,继续阅读
相关推荐











