3D虚拟现实模拟器提升微创血管手术培训效果
201 浏览量
更新于2024-08-26
收藏 2.42MB PDF 举报
本文档探讨了一种创新的研究论文,针对微创血管介入手术(Minimally Invasive Surgery, MIS)的训练需求,提出了一种先进的3D虚拟现实(Virtual Reality, VR)模拟器。在过去的十年里,心血管疾病的治疗技术取得了显著进步,但这些复杂的医疗程序对操作者的经验和技能提出了高要求。因此,设计一款能够提供逼真体验的模拟器变得尤为重要。
该3D虚拟现实模拟器的核心功能包括:
1. 患者数据驱动的三维模型:通过解析真实的患者数据,如CT或MRI图像,该系统能生成高度逼真的三维血管模型,甚至包括跳动的心脏,以便于医生在模拟环境中熟悉解剖结构。
2. 实时力反馈:模拟器内置实时计算模块,可以精确计算在手术过程中施加的力,提供触觉反馈,使医生在虚拟环境中感受到操作的真实感,这对于培养精细的手部技巧至关重要。
3. 器械模型与多体动力学:通过多体-弹簧模型,虚拟现实中代表导管(catheter)和引导线(guidewire)的器械能够呈现出真实世界中的运动和交互,增强训练的动态性和准确性。
4. 用户界面与多窗口显示:模拟器设计了直观且具有实时3D视角的用户界面,便于医生监控手术进程,同时打开多个窗口进行不同角度的观察,提高工作效率。
5. 人机交互模块:为了提升沉浸式学习体验,该模拟器还配备了人机交互模块,使得医生在操作虚拟器械时,能够感知到与真实手术相似的阻力和触感,从而更好地掌握手术操作技巧。
6. 实验验证:文中提到的实验部分,可能包括对模拟器有效性的测试,比如对比实际手术中的性能、医生满意度以及培训效果的提升等,以证明其在微创手术培训中的实际价值。
这款3D虚拟现实模拟器作为一项重要的研究工具,旨在通过提供一个逼真的手术环境,帮助医学生和临床医生提高微创手术技能,降低手术风险,并最终促进心血管疾病治疗领域的技术进步。
A 3D Virtual Reality Simulator for Training of Minimally Invasive
Surgery
Shao-Hua Mi, Zeng-Gunag Hou, Fan Yang, Xiao-Liang Xie and Gui-Bin Bian
Abstract— For the last decade, remarkable progress has been
made in the field of cardiovascular disease treatment. However,
these complex medical procedures require a combination of
rich experience and technical skills. In this paper, a 3D virtual
reality simulator for core skills training in minimally invasive
surgery is presented. The system can generate realistic 3D
vascular models segmented from patient datasets, including a
beating heart, and provide a real-time computation of force
and force feedback module for surgical simulation. Instruments,
such as a catheter or guide wire, are represented by a multi-
body mass-spring model. In addition, a realistic user interface
with multiple windows and real-time 3D views are developed.
Moreover, the simulator is also provided with a human-machine
interaction module that gives doctors the sense of touch during
the surgery training, enables them to control the motion of a
virtual catheter/guide wire inside a complex vascular model.
Experimental results show that the simulator is suitable for
minimally invasive surgery training.
I. INTRODUCTION
Minimal invasive surgery is a superior treatment paradigm
for treating cardiovascular disease and stroke [1]. In a real
treatment paradigm, by pushing, pulling and twisting at the
proximal end of a catheter/guide wire, the catheter/guide
wire is manipulated under X-ray guidance through the ab-
dominal aorta system then into the aortic arch. Comparing
with the open surgery, the main advantages of this surgical
technique are smaller incisions and less painful. However,
these complex medical procedures require a combination of
rich experience and technical skills. It is difficult for doctors
to control a flexible catheter/guide wire by pushing, pulling
and twisting at the proximal end of the catheter/guide wire
only under the X-ray projection images. Therefore, in order
to complete a minimally invasive surgery, extensive training
is required [2-4].
Traditionally, the best training environment on which
the hospitals train the learners is mainly based on living
animals or actual patients. Developing a real-time interactive
3D computer-aided surgical simulation is desirable and can
provide a alternative to traditional training environment. In
this way, the virtual reality simulator using a haptic device
can help the doctors obtain the core skills of controlling a
catheter/guide wire and decrease the risk of errors.
Several virtual reality simulators have been developed or
commercialized in projects [5], [6]. However, these systems
do not simulate the catheter/guide wire insertion procedures
The authors are with the State Key Laboratory of Management and
Control for Complex Systems the Institute of Automation, Chinese Academy
of Science, Beijing shaoHua.mi@ia.ac.cn
with a complex vascular structure and do not deal with
the real-time interactions between a catheter/guide wire
and the vascular model or between a haptic device and
the catheter/guide wire. In this paper, a 3D virtual reality
simulator for training in minimally invasive surgery (in real-
time or near real-time) is presented. Comparing with the
existing system, this simulator can provide a realistic 3D
virtual training environment and support real-time human-
machine interactions. The system has the following charac-
teristics: provides realistic and complex 3D vascular models,
which is generated from computed tomography angiography
(CTA) series in DICOM datasets captured in real patients;
provides a real-time virtual catheter/guide wire based on
multi-body mass-spring physical model; provides a real-time
force computation and force feedback computation module;
provides a real-time 3D rendering module and a real-time or
near real-time human-machine interaction module [7-9].
Organization of the paper is as follows. Section II outlines
an overview of the system. Section III describes the exper-
iments and presents the results. Section IV introduces the
future works and concludes this paper.
II. SYSTEM OVERVIEW
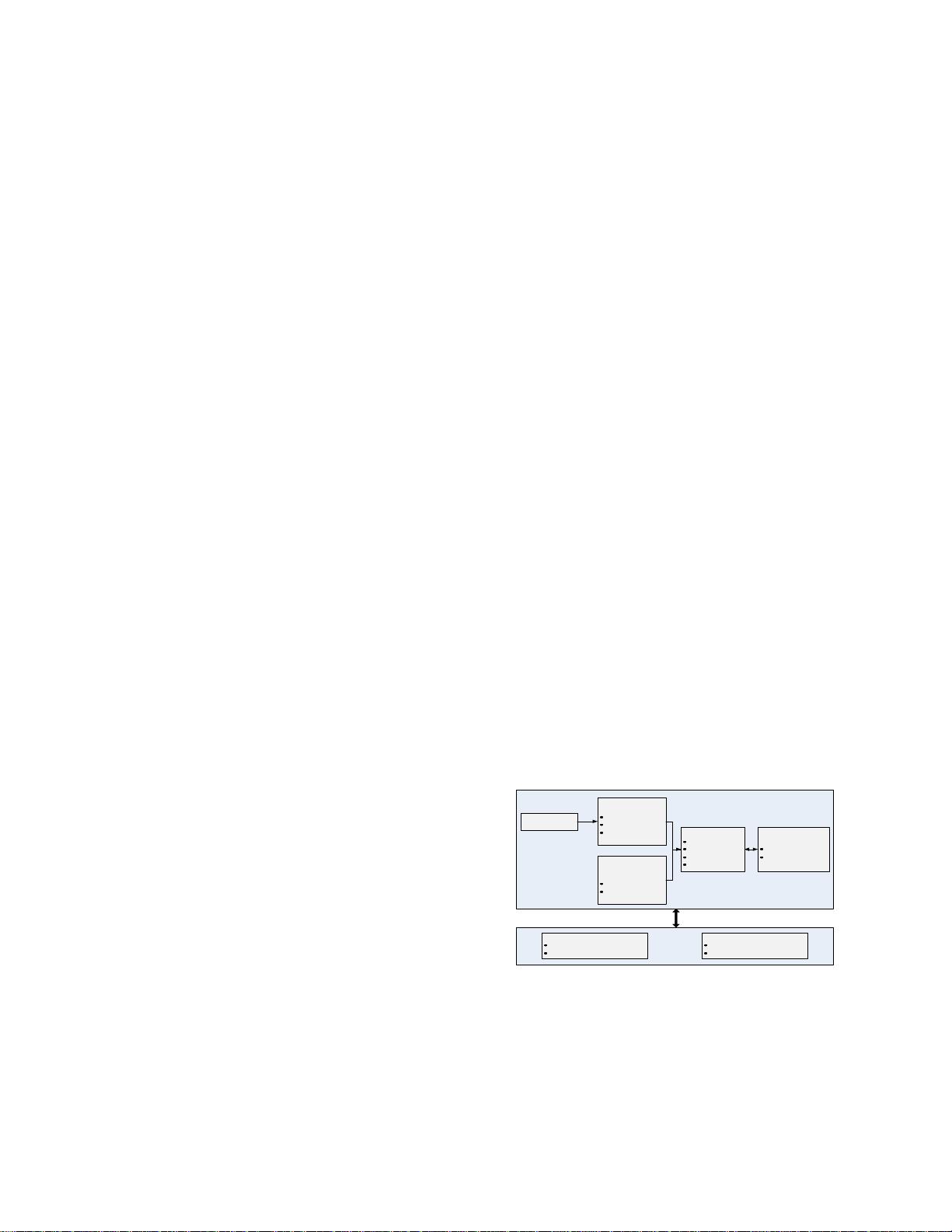
Fig. 1 overviews the real-time interactive 3D virtual reality
simulator. The system consists of six major components:
kernel module, device controller module, 3D vascular model
module, catheter/guide wire model module, user interface
module and human-machine interaction module.
Device Controller
Force Computation
Feedback Computation
3D Vascular Model
Geometric Model
Physical Model
Heart-beat Model
CTA Datasets
Kernel
3D Rendering
Math Library
Collision Detection
Collision Response
User Interface
Scene Stats
GUI
Human-machine Interaction
Keyboard Mode
Haptic Device Mode
Catheter/Guide wire
Model
Geometric Model
Physical Model
Fig. 1. Overview of the system
The prototype for the simulator is shown in Fig. 2.
A. 3D Vascular Model
A realistic and complex 3D vascular geometric model is
imported into the virtual environment of the system, which
is generated from computed tomography angiography (CTA)
series in DICOM datasets captured in actual patients, as
978-1-4244-7929-0/14/$26.00 ©2014 IEEE 349
下载后可阅读完整内容,剩余3页未读,立即下载
2013-01-05 上传
2021-08-12 上传
2021-03-19 上传
2021-08-13 上传
2021-04-24 上传
2021-03-30 上传
2021-04-10 上传
2021-08-14 上传

weixin_38672794
- 粉丝: 5
- 资源: 924
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
