库卡机器人C2/C3外部通讯配置详解
需积分: 34 22 浏览量
更新于2024-07-15
1
收藏 866KB PDF 举报
"库卡机器人C2及C3机器人外部通讯配置手册"
库卡机器人是工业自动化领域的知名品牌,其产品广泛应用于各种生产线上的精准定位、搬运和装配任务。本手册主要针对的是KUKA KRC2和KRC3型号的机器人,它们在与外部设备通信方面具有高度灵活性和可配置性。手册中的内容涵盖了如何通过库卡系统软件(KSS)的版本5.2进行有效的外部通讯设置。
"Konfiguration PHR5.209.03.01en"是手册的特定版本,可能包含了一些特定的更新和修正,旨在帮助用户理解和配置这些机器人的控制系统。文档的发行日期为2004年1月20日,版本号为01,表明这是该系列的一个早期版本。
手册首先介绍了“配置”菜单的功能,这是对机器人系统进行定制和设置的关键入口。"The ‘Configure’ menu"部分详细阐述了如何通过这个菜单来调整机器人与外部设备交互的方式。在"1.1.1 I/O"子章节中,特别提到了输入/输出(I/O)配置,这是实现机器人与其他自动化设备(如PLCs,编程逻辑控制器)通信的基础。
"1.1.1.1 Automatic External"部分可能涉及自动外部设备配置,这意味着机器人可以自动识别并适应与其连接的外部设备,简化了集成过程。这通常包括设置数字输入/输出信号,模拟信号,以及可能的以太网或串行通信协议,如TCP/IP、PROFIBUS、PROFINET等。
该文档还强调,虽然内容已经过检查以确保与硬件和软件的描述一致,但可能存在未描述的其他功能,且在维修或替换时不能保证所有功能可用。此外,由于技术的持续发展,手册内容可能会有技术性变更,但不会影响功能的正常使用。
"PD Interleaf"可能是文档制作或排版相关的标识,可能表示这是一个分页或修订的标记。手册的内容结构还包含更多章节,但未在提供的信息中详细列出,这暗示手册可能涵盖网络配置、协议设置、故障排查等多个主题,以确保用户能够全面理解并成功配置库卡机器人的外部通讯功能。
这份手册是库卡机器人用户和系统集成工程师的重要参考资料,它提供了详尽的步骤和指导,以帮助他们充分利用KRC2和KRC3机器人的通讯能力,与工厂自动化环境中的其他设备进行有效互动。

Configuration
16 of 96
KonfigurationPHR5.2 09.03.01 en
If the functions of the user level are not sufficient, it is possible to switch to the expert level.
Experts can then use the ASCII keypad to program in the robot programming language KRL
(KUKA Robot Language) and to edit system or initialization files (bus systems). KRL is a
high–level, PASCAL–based programming language, which is thus also suitable for
programming complex tasks.
Access to the expert level is protected by a password.
I/O
I/O Driver
SUBMIT Interpreter
Statuskeys
Jogging
User group
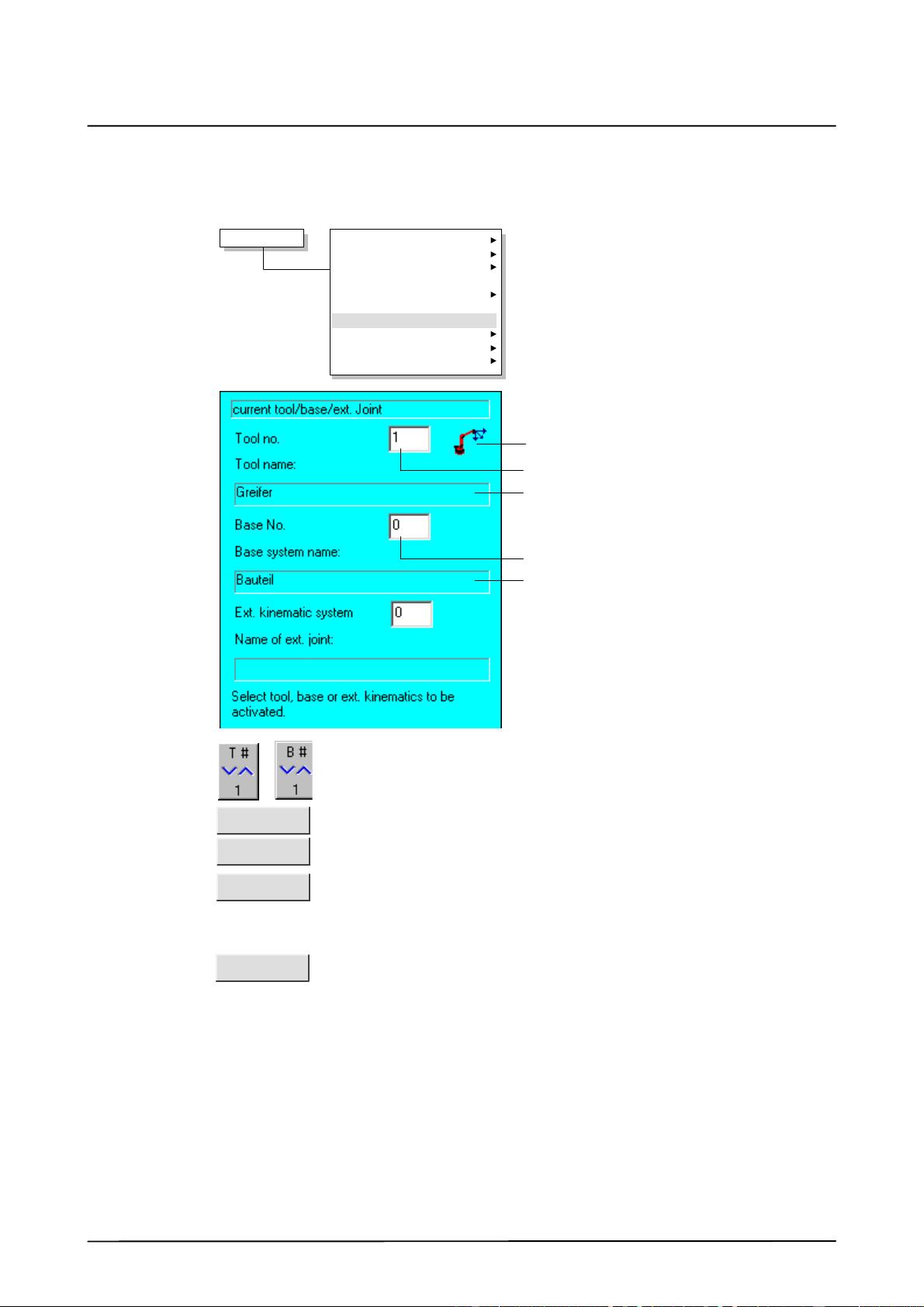
Cur. tool/base
Tool definition
On/Off Options
Miscellaneous
Configure
The status window illustrated here is
opened.
Under normal circumstances, when the system is started, you will find yourself in the “User”
group. Higher “user levels” can only be reached by entering a level–specific password.
Once one of the softkeys available for user group selection has been pressed,
the content of the status window changes. You are asked to enter the pass-
word for the user group selected.
Enter the password for the selected user group. Pay attention to the use of
upper and lower case characters when entering passwords. Then press the
softkey “OK”.
You can exit this function at any time. In this case the user group does not
change.
User
Expert
Administrator
OK
Cancel



剩余98页未读,继续阅读
2018-11-01 上传
2020-11-03 上传
2021-11-14 上传
2023-04-20 上传
2017-02-23 上传
126 浏览量
103 浏览量

永远的8&24
- 粉丝: 2
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
