在线逆变器故障诊断:Buck-Converter BLDC电机应用
需积分: 9 60 浏览量
更新于2024-07-11
收藏 1.54MB PDF 举报
"Buck-Converter BLDC电动机组合的在线逆变器故障诊断"
这篇研究论文探讨了在电力电子领域中的一个重要课题——"Buck-Converter BLDC电动机组合的在线逆变器故障诊断"。Buck转换器(Buck Converter)是一种直流-直流(DC-DC)转换器,它通过连续或断续的开关模式控制,能够降低输入电压到所需的较低输出电压。而无刷直流电机(BLDC Motor)因其结构简单、可靠性高,在空间应用中被广泛采用。
故障容忍控制(Fault-Tolerant Control, FTC)是确保电机即使在故障状态下也能持续运行的关键技术。为了实现这一目标,故障诊断必须提前进行,以便及时采取相应的FTC策略。论文提出了一种针对具有低感抗和非理想反电动势的高速BLDC电机、并基于带有Buck DC-DC转换器的三相全桥逆变器的在线模型故障诊断方法,特别适用于磁悬浮控制力矩陀螺的应用。
该方法能够检测并识别Buck转换器中单个开关的开路和短路故障,以及三相全桥逆变器中的类似故障。此外,论文还提出了保护措施,旨在隔离故障,防止二次故障的发生。通过模拟和实验结果的对比分析,证明了该方法的有效性和可行性。
这项工作对提高电机系统的鲁棒性、安全性和整体性能有着重要的贡献,对于设计和维护涉及Buck-Converter和BLDC电机的电力系统具有实际指导意义。它不仅为实时故障检测提供了理论依据,也为未来相关领域的故障诊断算法和控制策略优化提供了参考。
2676 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 30, NO. 5, MAY 2015
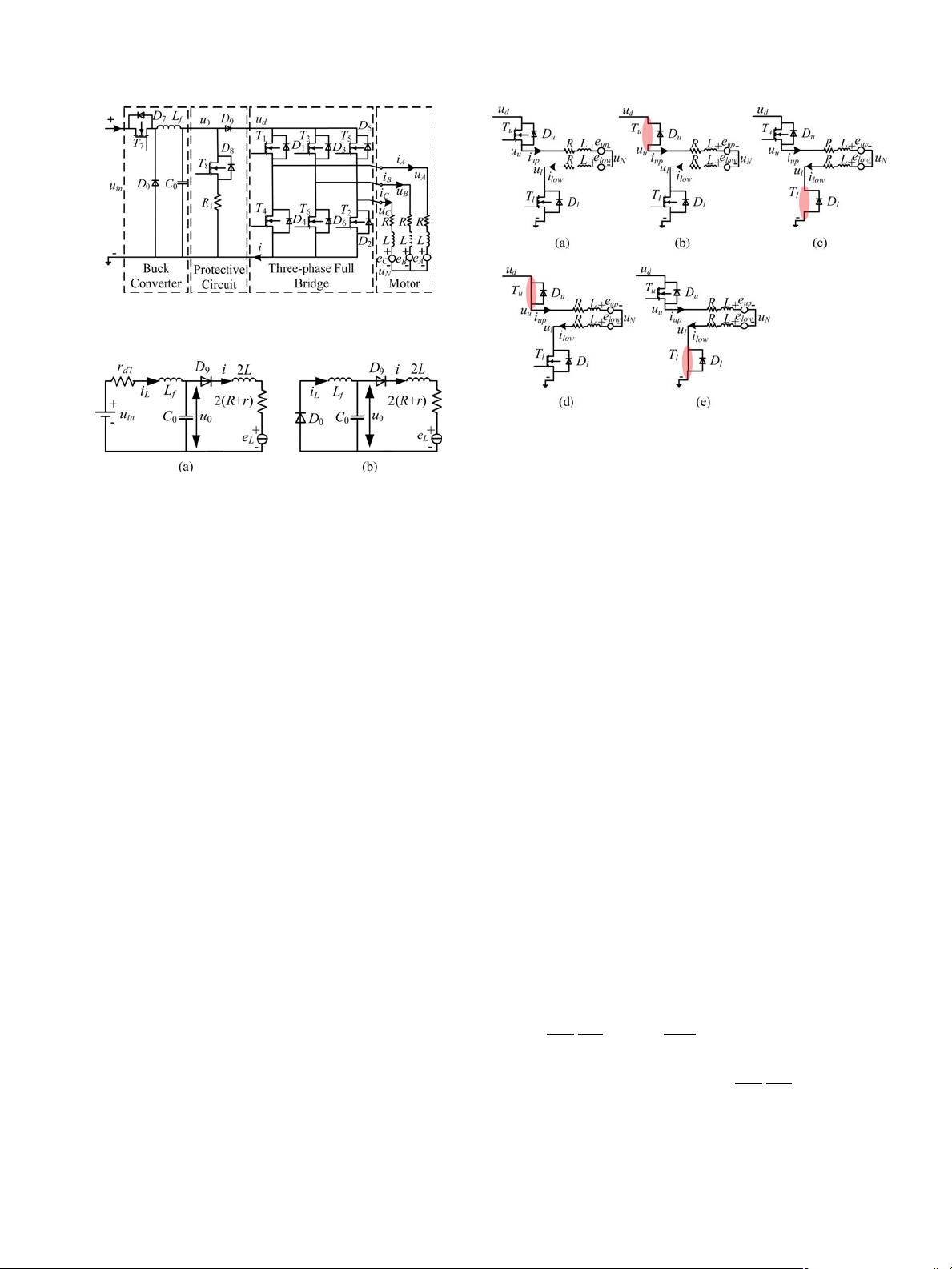
Fig. 1. Topology of buck-converter motor combinations.
Fig. 2. Equivalent circuit of buck-converter motor combinations. (a) T
7
is ON.
(b) T
7
is OFF.
shown as
⎧
⎪
⎪
⎨
⎪
⎪
⎩
u
0
= u
in
d
1
− Δu
dio
(1 − d
1
) − L
f
di
L
/dt − r
d7
i
L
d
1
+ w
1
C
0
du
0
/dt = i
L
− i, w
2
=0
u
0
=2R
p
i + e
L
+Δu
dio
(1)
where u
in
and u
0
are the input and output voltages of buck
converter, L
f
and C
0
are the inductance and capacitor of buck
converter, r
d7
is the on-resistance of switch T
7
, i
L
is the induc-
tance current in buck converter, i is the dc-link current of the
motor, Δu
dio
is the forward voltage of the diode D
0
and D
9
,
R
p
is the single phase resistance satisfying R
p
= R + r, R is
the stator resistance, r is the switch on-state resistance, e
L
is the
line-to-line back EMF voltage satisfying e
L
= e
up
− e
low
, e
up
and e
low
are back EMF voltages of the upper and lower side
conducting phases, d
1
is the duty cycle of the transistor T
7
, w
1
and w
2
are additive perturbation signals due to occurrence of
switch fault in buck converter and three-phase full bridge.
Fig. 3 shows the equivalent circuits under the normal and
faulty case of single switch damage in three-phase full bridge.
We assume that the phase inductance of the ironless stator motor
is negligible. The voltage equation of the BLDC motor can be
represented as
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
u
d
= u
u
+ ri + w
2−1u
u
l
= w
2−1l
+ ri
u
ul
=2Ri + e
L
+ w
2−2u
+ w
2−2l
u
N
= w
2−1l
+ R
p
i − e
low
+ w
2−2l
w
2−1
= w
2−1u
+ w
2−1l
w
2−2
= w
2−2l
+ w
2−2u
w
2
= w
2−1
+ w
2−2
(2)
Fig. 3. Operating state under the normal and faulty cases of switch damage
in three-phase full bridge. (a) Normal state. (b) Upper switch open-circuit fault
state. (c) Lower switch open-circuit fault state. (d) Upper switch short-circuit
fault state. (e) Lower switch short-circuit fault state.
where w
2−1
and w
2−2
are additive perturbation signals due to
occurrence of switch open-circuit fault and short-circuit fault in
three-phase full bridge. The subscripts u and l represent the up-
per switch fault and lower switch fault, respectively. Normally,
u
d
≤ u
0
is achieved when the motor is operating at the healthy
state.
There is a faint possibility that the switch open-circuit fault
and short-circuit fault occur at the same time in three-phase
full bridge. We assume that when a switch open-circuit fault
happens, w
2
= w
2−1
and w
2−2
=0are achieved. Also, when
a switch short-circuit fault happens, w
2
= w
2−2
and w
2−1
=0
are achieved.
Depending on the drive system shown in Fig. 1, the faults
which should be detected and identified are classified as:
1) open-circuit damage of switch in buck converter (F
1
);
2) short-circuit damage of switch in buck converter (F
2
);
3) open-circuit damage of single switch in three-phase full
bridge (F
3
);
4) short-circuit damage of single switch in three-phase full
bridge (F
4
).
III. V
OLTAGE OBSERVER
From (1), the output voltage of buck converter can be simpli-
fied as
u
0
+
L
f
2R
p
du
0
dt
− L
f
C
0
d
2
u
0
dt
2
= u
in
d
1
− Δu
dio
(1 − d
1
)
+
L
f
2R
p
de
L
dt
+ w
1
, (3)
by neglecting the very low stator inductance of the motor and
the ultralow on-resistance of switch T
7
. It can be learnt that the
value of de
L
/dt cannot be neglected for the motor with nonideal
back EMF wave in which the flat width is less than 120 electrical
剩余14页未读,继续阅读
2020-07-13 上传
2022-07-15 上传
2022-07-15 上传
2022-07-15 上传
2019-09-19 上传
2022-07-15 上传
2022-07-14 上传
2022-11-18 上传
2022-11-18 上传

weixin_38508497
- 粉丝: 7
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
