超分辨率技术综述:未来电子成像的关键
需积分: 9 84 浏览量
更新于2024-08-02
收藏 2.46MB PDF 举报
本文是一篇关于超分辨率(Super-Resolution)的综合概述论文,发表于2003年的《IEEE信号处理杂志》。超分辨率技术是电子成像领域的一个关键技术,其目标是通过各种方法提高图像的分辨率,使图像细节更加丰富,从而在医学诊断、卫星遥感以及计算机视觉等应用中发挥关键作用。
传统的数字成像设备,如CCD和CMOS传感器,虽然能满足大部分日常需求,但它们的分辨率和价格往往无法满足日益增长的高清(HR)成像需求。例如,消费者期待更便宜且性能更强的高分辨率数码相机或摄像机,而科研人员则希望接近传统35mm胶片水平的超高分辨率。超分辨率技术的研究旨在打破这些限制,通过提升图像的细节,增强图像质量和可用性。
论文可能详细探讨了以下几个关键知识点:
1. **原理与方法**:超分辨率技术包括像素插值、图像重建、多帧融合、深度学习等方法,通过算法手段合并低分辨率(LR)图像,生成具有更高分辨率的新图像。
2. **频域处理**:利用频域分析,通过滤波、频率增益或压缩等操作,提升图像的空间分辨率。
3. **深度学习应用**:近年来,深度神经网络在超分辨率领域的应用日益广泛,尤其是卷积神经网络(CNN),通过大量训练数据和端到端的学习,能够自动提取并组合图像特征,显著提高重建效果。
4. **医疗影像处理**:在医疗领域,超分辨率技术有助于识别病灶、增强组织结构,对诊断支持至关重要。
5. **遥感和计算机视觉**:卫星图像的超级分辨率可以提高地理信息的精确度,同时改善图像识别和物体检测的性能。
6. **技术挑战与限制**:论文可能会讨论技术上的局限性,如噪声抑制、伪影减少、计算复杂度等问题,以及如何解决这些问题以达到实际应用中的最优效果。
7. **未来趋势与展望**:文章可能会探讨超分辨率技术的前沿进展,包括新型传感器、实时处理能力提升以及与云计算、物联网等新兴技术的结合。
这篇综述论文为学习者提供了一个全面的框架,帮助理解超分辨率技术的基本原理、实践应用以及当前和未来的研究方向,对于想要在这个领域深入探索的读者来说,具有很高的参考价值。
generally unknown, we need to estimate the scene mo
-
tion for each frame with reference to one particular frame.
The warping process performed on HR image
x
is actu
-
ally defined in terms of LR pixel spacing when we esti
-
mate it. Thus, this step requires interpolation when the
fractional unit of motion is not equal to the HR sensor
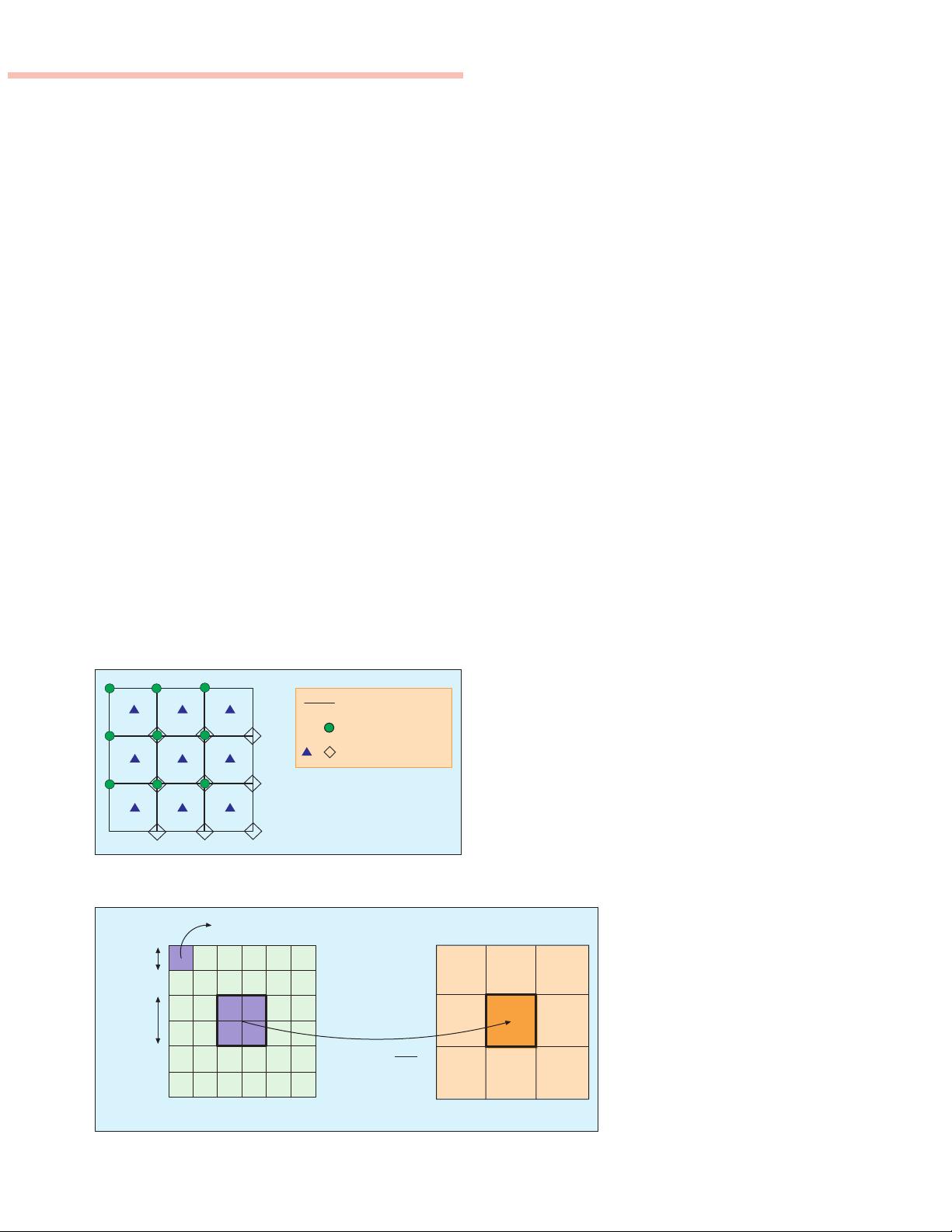
grid. An example for global translation is shown in Figure
4. Here, a circle (䊊) represents the original (reference)
HR image
x
, and a triangle (䉭) and a diamond (䉫)are
globally shifted versions of
x
. If the down-sampling factor
is two, a diamond (䉫) has (0.5, 0.5) subpixel shift for the
horizontal and vertical directions and a triangle (䉭) has a
shift which is less than (0.5,0.5). As shown in Figure 4, a
diamond (䉫) does not need interpolation, but a triangle
(䉭) should be interpolated from
x
since it is not located
on the HR grid. Although one could use ideal interpola-
tion theoretically, in practice, simple methods such as
zero-order hold or bilinear interpolation methods have
been used in many literatures.
Blurring may be caused by an optical system (e.g., out
of focus, diffraction limit, aberration, etc.), relative motion
between the imaging system and the original scene, and
the point spread function (PSF) of the LR sensor. It can be
modeled as linear space invariant (LSI) or linear space vari
-
ant(LSV),anditseffectsonHRimagesarerepresentedby
the matrix
B
k
. In single image restoration applications,
the optical or motion blur is usually considered. In the SR
image reconstruction, however, the finiteness of a physical
dimension in LR sensors is an important factor of blur.
This LR sensor PSF is usually modeled as a spatial averag
-
ing operator as shown in Figure 5. In the use of SR recon
-
struction methods, the characteristics of the blur are
assumed to be known. However, if it is difficult to obtain
this information, blur identification should be incorpo
-
rated into the reconstruction procedure.
The subsampling matrix
D
generates aliased LR im
-
ages from the warped and blurred HR image. Although
the size of LR images is the same here, in more general
cases, we can address the different size of LR images by
using a different subsampling matrix (e.g.,
D
k
). Al
-
though the blurring acts more or less as an anti-aliasing
filter, in SR image reconstruction, it is assumed that
aliasing is always present in LR images.
A slightly different LR image acquisition model can be
derived by discretizing a continuous warped, blurred
scene [24]-[28]. In this case, the observation model must
include the fractional pixels at the border of the blur sup-
port. Although there are some different considerations
between this model and the one in (1), these models can
be unified in a simple matirx-vector form since the LR
pixels are defined as a weighted sum of the related HR
pixels with additive noise [18]. Therefore, we can express
these models without loss of generality as follows:
yWxn
kk k
=+ =, ,...,for kp1
, (2)
where matrix
W
k
of size
()NN LNLN
12
2
112 2
×
repre
-
sents, via blurring, motion, and subsampling, the contri
-
bution of HR pixels in
x
to the LR pixels in
y
k
. Based on
the observation model in (2), the aim of the SR image re
-
construction is to estimate the HR image
x
from the LR
images
y
k
for
kp= 1,...,
.
Most of the SR image reconstruc
-
tion methods proposed in the litera
-
ture consist of the three stages
illustrated in Figure 6: registration,
interpolation, and restoration (i.e.,
inverse procedure). These steps can
be implemented separately or simul
-
taneously according to the recon
-
struction methods adopted. The
estimation of motion information is
referred to as registration, and it is ex
-
tensively studied in various fields of
image processing [67]-[70]. In the
24 IEEE SIGNAL PROCESSING MAGAZINE MAY 2003
: Original HR Grid
: Original HR Pixels
: Shifted HR Pixels
,
s
4. The necessity of interpolation in HR sensor grid.
The SR image reconstruction is
proved to be useful in many
practical cases where multiple
frames of the same scene can
be obtained, including medical
imaging, satellite imaging, and
video applications.
HR Grid
LR Grid
HR Pixel
a
1
a
0
a
2
a
3
HR Image
LR Pixel =
(
)
LR Image
4
Σ
a
i
s
5. Low-resolution sensor PSF.
Authorized licensed use limited to: Peking University. Downloaded on May 18, 2009 at 07:52 from IEEE Xplore. Restrictions apply.
剩余15页未读,继续阅读
341 浏览量
490 浏览量
540 浏览量
182 浏览量
113 浏览量
783 浏览量
703 浏览量
点击了解资源详情
464 浏览量

purple_ice
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
