电力系统态势感知:CNN-LSTM驱动的预测模型提升
需积分: 5 27 浏览量
更新于2024-08-04
收藏 3.92MB PDF 举报
本文主要探讨了在电力系统中利用深度学习技术——特别是卷积神经网络(CNN)和长期短期记忆(LSTM)递归神经网络——来提升态势感知(SA)的预测能力。态势感知在电力系统的稳定性和安全性方面扮演着关键角色,尤其是在可再生能源集成后,系统面临着复杂多变的不确定性。以往的研究主要集中在SA的感知和理解阶段,而对预测这一高级且具有挑战性的环节鲜有涉及。
文章创新性地提出了一种基于CNN-LSTM网络的SA模型,该模型结合了CNN的局部特征提取能力和LSTM的序列建模优势。CNN在处理空间特征时表现出色,能从相量测量单元(PMU)数据中捕捉到时间序列中的模式,而LSTM则能够捕获数据中的长期依赖关系,从而实现对时空数据的有效挖掘。这种模型设计包括两个核心功能分支:一是应急定位器,用于精确定位系统故障的发生位置;二是稳定性预测器,旨在预判电力系统的未来稳定性状态。
作者强调,即使在数据充分性较低的情况下,该CNN-LSTM模型也能展现出卓越的性能,如高精度的故障定位和稳定的稳定性预测。这表明,深度学习方法能够有效地应对电力系统动态环境下的复杂问题,提升态势感知的预测水平。研究成果发表在《工业信息化交易》(IEEE Transactions on Industrial Informatics)上,第17卷第10期,2021年10月,具有重要的理论和实际应用价值。
总结来说,本文的主要贡献在于将机器学习,尤其是深度学习技术与电力系统态势感知相结合,提出了一个创新的、在时空数据上高效协作的CNN-LSTM模型,对于电力系统的安全监控和决策支持具有重要意义。
WANG et al.: TOWARD THE PREDICTION LEVEL OF SITUATION AWARENESS 6953
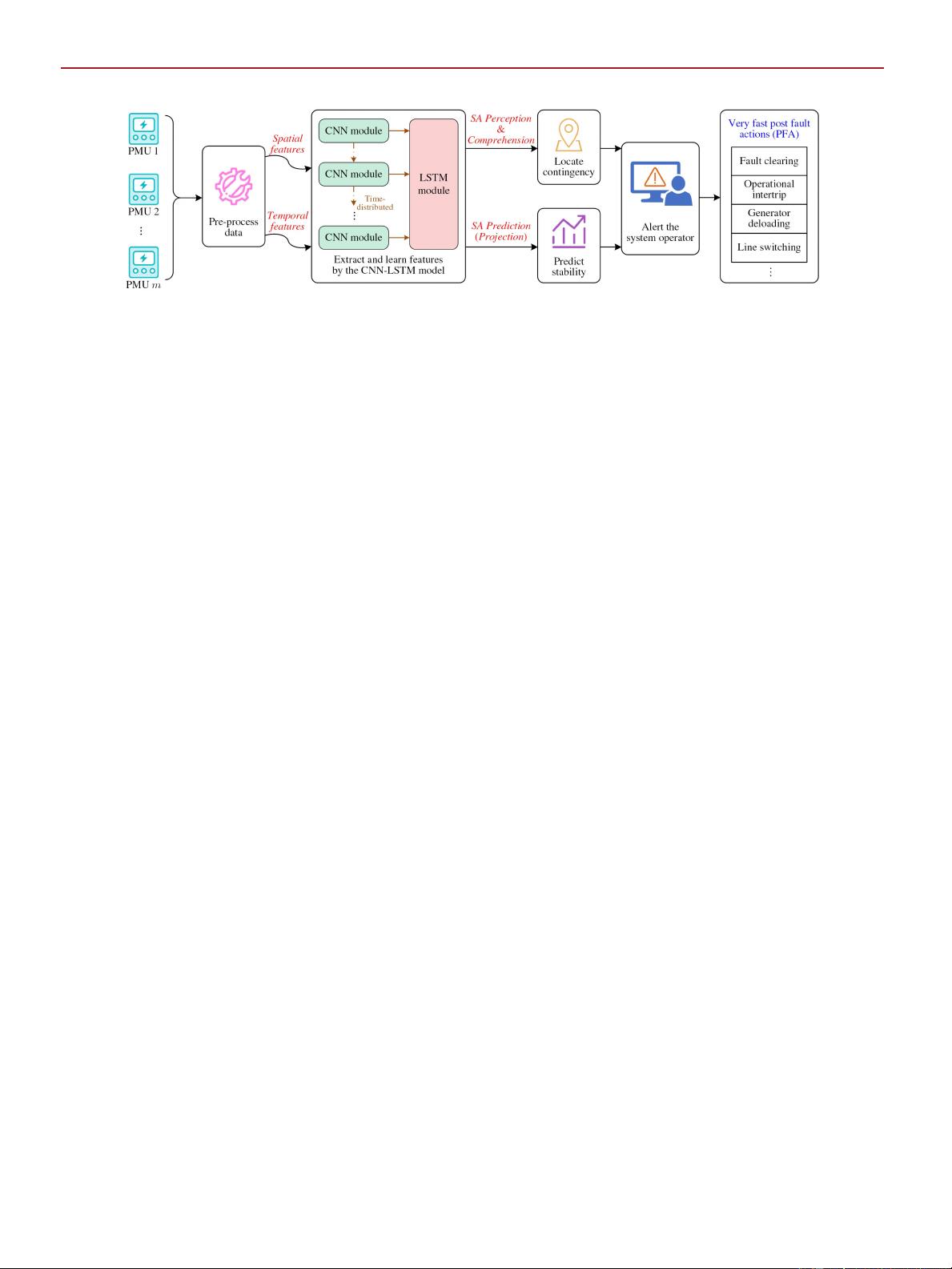
Fig. 1. Flowchart of the proposed SA model and its application.
the pixel-correlated arrays. The pooling layers (usually max
pooling) then merge those similar features in each feature
map [22]. RNN is another skillful model when processing
sequential data such as text and speech. RNN has a specialized
recurrent structure which can maintain memory over every time
step of the input sequence [23]. A variant of RNN, which is
known as LSTM network, has fixed the gradient vanishing or
exploding problems by a meticulously designed cell structure.
As a result, LSTM network has proved to be more powerful in
harnessing long-term memory [24].
The excellent performance of deep learning has facilitated a
number of data mining studies based on the wide-area PMU data.
Some of them utilized the spatial connectivity of the data [15],
[18], while others concentrated on the temporal correlation [14],
[16], [17]. However, few studies have made simultaneous min-
ing on both the spatial and temporal features. This will limit
the data mining ability of AI when dealing with the transient
stability prediction problems in power systems because power
system transient stability is a system-level issue which requires
exploration on the spatial connectivity, and at the same time
also a dynamic process which requires analysis on the temporal
correlation.
III. M
ETHODOLOGY
A. Framework Overview
The framework and workflow of the proposed SA model is
outlined in Fig. 1. First, all the measurement data from PMUs
are obtained and preprocessed to uncover the spatio-temporal
patterns inside the data. As the main body of the workflow,
the CNN-LSTM model is aggregated by two deep learning
modules—the CNN module and the LSTM module. The spatial
features within the data are extracted and learned by the CNN
module, while the temporal features are handled by the LSTM
module. The aggregation of these two modules is realized by a
time-distributed operation.
The CNN-LSTM model is designed to concurrently accom-
plish two tasks, i.e., contingency location and stability predic-
tion. By feeding a very short period of postfault data, the model
can not only locate the exact fault l ocation at present, but also
predict the stability status of the system in the future. In this
way, all three levels of SA (i.e., perception, comprehension, and
prediction) can be achieved. As for the field application, the
proposed SA model can alert the system operator in a prompt
and accurate manner, in order to implement very fast postfault
actions (PFA) subsequently.
B. Data Preprocessing
1) Matrix Mapping: As the first component of the CNN-
LSTM model, the CNN module requires the shape of input data
to be 2-D array-like. Therefore, it is necessary to map the 1-D
measurement data into the expected 2-D form. Some pioneer
studies have presented feasible solutions on the PMU data
preparation for the CNN model. For example, Gupta et al. [16]
proposed a novel operation to map the 1-D PMU data into a 2-D
heatmap representation, to facilitate the instability prediction
function of the CNN model. Inspired by [16], this article creates
an improved mapping operation named matrix mapping, to map
the 1-D measurement data (i.e., 1-D vector which consists of
all PMU measurements) into a 2-D measurement matrix. The
matrix mapping is operated as
X =[x
i,j
]
m×m
=
x
i,j
= 0 i = j
x
i,j
= a
i
− a
j
i = j
(1)
where X is the m × m measurement matrix, x
i,j
denotes every
entry of X for i = 1, 2,...,m, and j = 1, 2,...,m, m is the
total number of measurements. Besides, a
i
and a
j
are the
respective ith and jth measurement from the original vector
[a
1
,...,a
i
,...,a
j
,...,a
m
].
The matrix mapping uses a simple but effective way to obtain
the spatial relationships of every PMU measurement. These
spatial relationships are stored pairwise as every entry of the 2-D
measurement matrix. By representing the spatial r elationships,
the 2-D measurement matrix is filled with implicit spatial fea-
tures which are well prepared to be captured by the subsequent
CNN module. In addition, since the difference between two mea-
surements tends to be small, such matrix mapping is conducive
to form a uniform scale of the 2-D measurement matrix, which
adapts better to the shared weights property of CNN.
2) Label Encoding: Most of the deep learning models (in-
cluding the proposed CNN-LSTM model) require all input
variables and output variables to be numerical. However, the
label data are in fact categorical rather than numerical which
cannot be directly utilized as the output of the CNN-LSTM
model. Therefore, it is necessary to encode the label data into a
numerical form to fulfill the output requirements. To be specific
Authorized licensed use limited to: Wuhan University. Downloaded on July 04,2022 at 03:51:10 UTC from IEEE Xplore. Restrictions apply.
剩余10页未读,继续阅读
点击了解资源详情
2879 浏览量
9480 浏览量
252 浏览量
2025-01-22 上传
基于LSTM、CNN-LSTM、PSO-LSTM及PSO-CNN-LSTM的光伏功率预测算法误差对比分析,基于LSTM、CNN-LSTM、PSO-LSTM及PSO-CNN-LSTM算法的光伏功率预测精
2025-02-16 上传
"基于LSTM、CNN-LSTM、PSO-LSTM及PSO-CNN-LSTM的光伏功率预测对比分析",LSTM,CNN-LSTM,PSO-LSTM,PSO-CNN-LSTM做光伏功率预测,对比各种算法
2025-02-06 上传
四类算法在多输入单输出数据回归预测中的性能对比:LSTM、CNN-LSTM、PSO-CNN-LSTM与GAPSO-CNN-LSTM,LSTM,CNN-LSTM,PSO-CNN-LSTM,GAPSO-C
2025-02-06 上传
105 浏览量

RachelMuZy
- 粉丝: 143
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
