TMS320F206 DSP驱动的冗余TT-VGT机器人运动学求解与并行优化
54 浏览量
更新于2024-09-01
收藏 201KB PDF 举报
本文主要探讨了基于TMS320F206 DSP芯片的冗余度TT-VGT机器人运动学求解技术。TMS320F206 DSP是一种高性能的数字信号处理器,因其并行架构、专用硬件乘法器以及高速特性,使其在实时控制和自动化应用中表现出色。传统的机器人控制系统往往将运动学计算任务分配给PC机,但本文创新性地提出将这一任务移至DSP,以利用其强大的并行计算能力。
TMS320F206 DSP的哈佛结构和流水线操作使得程序执行与数据访问可以同时进行,极大地提高了计算效率。此外,它内置的大容量RAM和Flash RAM允许大部分程序和数据存储在芯片上,减少了外部存储需求。通过这种结构,机器人位姿逆解(即从末端执行器的运动轨迹反推出关节角度)的计算过程得以加速,从而实现更精确和实时的机器人控制。
TT-VGT机器人采用四面体结构,每个基本单元由杆件和球关节连接,这种变几何的设计提供了更高的灵活性。在本文的仿真计算中,作者针对这种复杂的机器人模型,运用DSP的优化算法进行运动学分析,旨在提高机器人在实际工作中的运动性能和可靠性。
这项研究展示了如何通过TMS320F206 DSP的并行计算优势来提升冗余度TT-VGT机器人的运动学求解能力,从而简化控制系统、降低延迟,并为机器人提供更快、更精确的动态响应。这对于工业自动化和机器人技术的发展具有重要意义,特别是在需要实时控制和高精度定位的领域。
基于基于TMS320F206 DSP的冗余度的冗余度TT—VGT机器人的运动学求机器人的运动学求
解解
提出了采用TMS320F206 DSP芯片进行冗余度TT-VGT机器人运动学计算方案。该方案充分利用DSP 并行特性
进行机器人位姿逆解计算,在程序设计中采用了多种技巧以实现优化计算,并对四重四面体变几何桁架(TT-VGT)机
器人进行了仿真计算。
摘摘 要:要: 提出了采用
关键词: 关键词: DSP 并行计算 TT—VGT机器人 运动学
20世纪90年代以来,数字信号处理器(DSP)在自动控制中得到了越来越广泛的应用。这主要是因为它具有以下优点:(1)并行
体系结构和专用的硬件乘法器使得DSP运算能力极强;(2)高速特性使得DSP能实现实时处理和实时控制。
据调查,目前将DSP应用于机器人控制系统的方案,通常是将机器人位置控制中运动学计算任务交给PC机完成,PC机将计算
结果(机器人各关节的转角)下载到以DSP芯片为核心的电机控制器,实现机器人控制?眼2?演。本文提出将机器人运动学计算任
务直接交给DSP的控制方案,利用DSP 的并行性计算特点,提高了计算速度,缩小了控制系统的体积。仿真结果表明,该方案计算
精度和实时性都较好。
1 TMS320F206 DSP结构特点结构特点
TMS320F206DSP基本结构特点包括:①哈佛结构;②流水线操作;③专用的硬件乘法器;④特殊的DSP指令;⑤快速的指令周
期(25ns);⑥芯片内部集成了4.5KRAM和32K FLASH RAM,大多数程序及数据可存放在DSP芯片内。这些特点使得该芯片可以
实现快速的DSP计算,并能使大部分运算能够在一个指令周期内完成。TMS320F206的并行性表现在以下两方面:
(1)哈佛结构是不同于传统的冯诺曼结构的并行体系结构,其主要特点是将程序和数据存储在不同的存储空间,因此取指令和
执行能完全重叠运行。
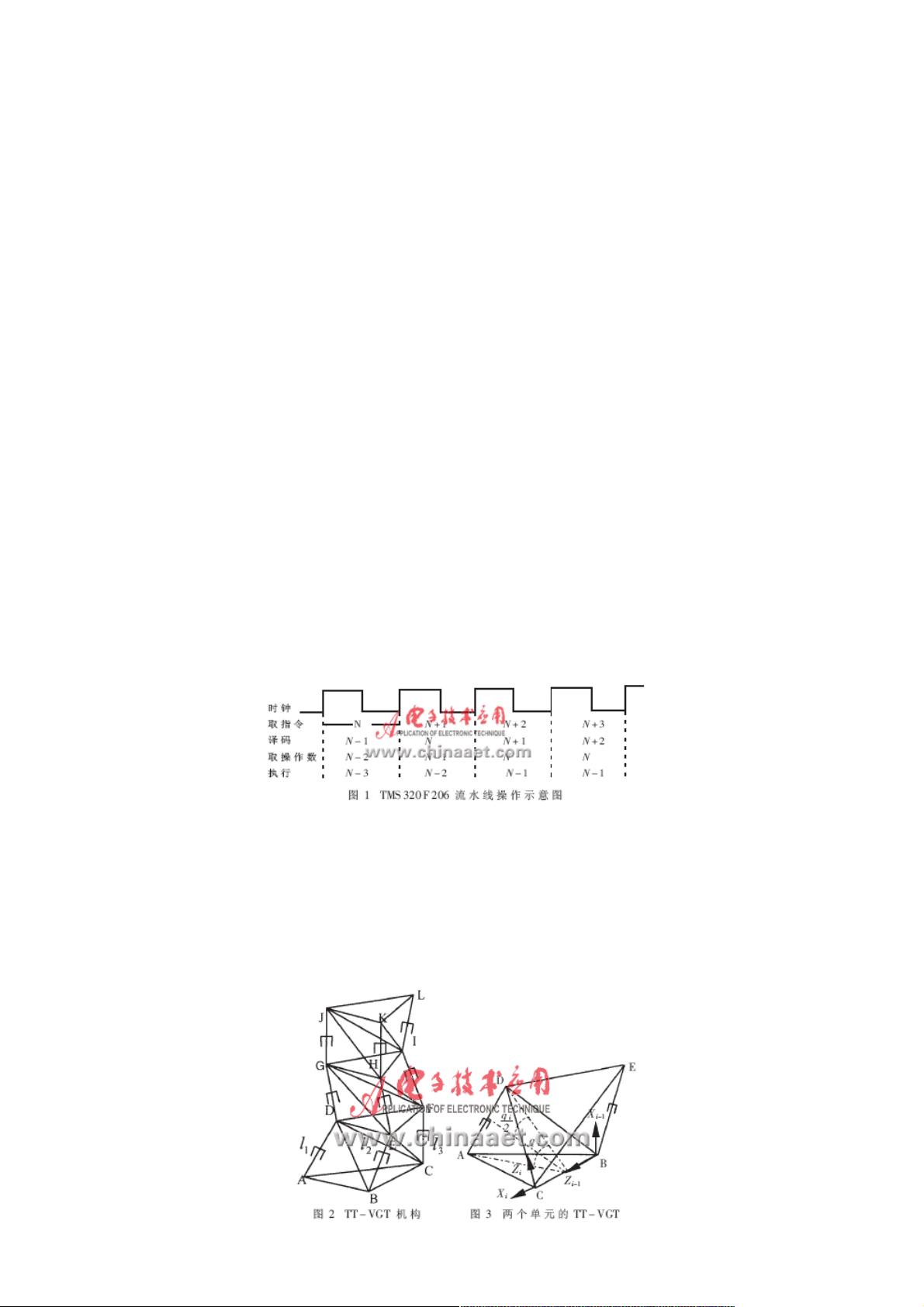
(2)DSP芯片广泛采用流水线以减少指令执行时间。指令流水线由一系列总线操作组成。TMS320F206流水线具有4个独立
的操作阶段:取指令、译码、取操作数和执行,如图1所示。由于4个操作阶段是独立的,因此,这些操作可以交叠地进行。
2 TT-VGT机器人的位姿逆解机器人的位姿逆解
TT-VGT(Tetrahedron- Tetrahedron—Variable Geometry Truss)机器人是由多个四面体组成的变几何桁架机器人,平面
ABC为机器人的基础平台,基本单元中各杆之间由球铰连接,通过可伸缩构件li(i=1,2,…n)的长度变化,来改变机构的构形,如图
2所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-26 上传
2020-10-23 上传
点击了解资源详情
2020-12-05 上传
2020-12-08 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38743391
- 粉丝: 9
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
