基于内模控制的直流伺服电机分数阶控制器设计与验证:鲁棒与效率提升
需积分: 15 84 浏览量
更新于2024-09-13
收藏 1.2MB PDF 举报
本文探讨的是"基于内模控制的直流伺服电机分数阶控制方案的设计与验证"。作者Sahaj Saxena和Yogesh V. Hote针对直流伺服电机设计了一种创新的控制策略,利用了内模控制和CRONE(Commande Robuste d'Ordre Non Entier,非整数阶命令控制)原理。与传统的分数阶PID控制器相比,该方法显著简化了设计,只需要两个调谐参数,这使得控制器的参数调整更加直观,可以根据预期的增益交叉频率和相位裕度进行优化。
分数阶控制器被设计成PID形式,特别包含了一个分数阶积分器,这种结构能够提供更灵活的动态响应特性,对于速度和位置控制问题具有优势。在实际应用中,研究者在精密模块化伺服系统中测试了这一控制器,证明其在鲁棒性和性能优化方面超越了基于整数阶技术的传统控制器。通过与标准的QUBE-Servo 2平台进行对比验证,该方案展示了在伺服电机控制领域的实用性和有效性。
文章发表于《IET电子技术评论》杂志,ISSN号分别为0256-4602(印刷版)和0974-5971(在线版),并指出设计和验证工作于2017年12月完成。该论文自发布以来受到了广泛关注,获得了134次的阅读量,同时引用次数为2次,表明它在学术界引起了讨论和认可。
总结来说,这篇论文的核心贡献在于提出了一种易于调谐且性能优越的分数阶控制方案,尤其适合于直流伺服电机,对于提高伺服系统的动态响应、稳定性和效率具有实际价值。对于从事电机控制、自动化或控制理论领域的研究人员和工程师来说,这是一个值得深入研究和借鉴的重要成果。
phase of the loop transfer function is flat at the gain
crossover frequency thereby guaranteeing the invariance
of the phase margin with respect to the process DC-gain
variation such as pay-load, amplifier feed forward gain
and the load current/resistance in power systems. On
the other hand through IMC strategy, the PID controller
is tuned by a single parameter unlike three parameters
in traditional PID controllers. Also, on the contrary to
the conventional fractional-order PID controllers which
require five parameters, the proposed scheme requires
only two tuning parameters. The tuning law is based on
the desired gain crossover frequency and phase margin.
The proposed scheme is verified experimentally on hard-
ware set-up of DC servomotor for speed control prob-
lem. It is observed that the dynamic properties of the
closed-loop with the proposed fractional-order control-
ler are better than that of the closed-loop with the inte-
ger-order controller. Moreover, the controller brings
optimality in terms of integral error specification. The
proposed scheme is further extended to position control
problem and validated on QUBE-Servo 2 set up.
The other contribution in this paper comes in the form of
evaluation of the robustness of the control loop. We
know that the CRONE control principle yields robustness
against plant perturbation but the limit of the plant
uncertainty is not directly evaluated through this method.
To fulfill this gap, we have derived the condition which
provides the limit of uncertainty in the plant gain varia-
tion to maintain the robust performance of controller.
2. PROBLEM FORMULATION
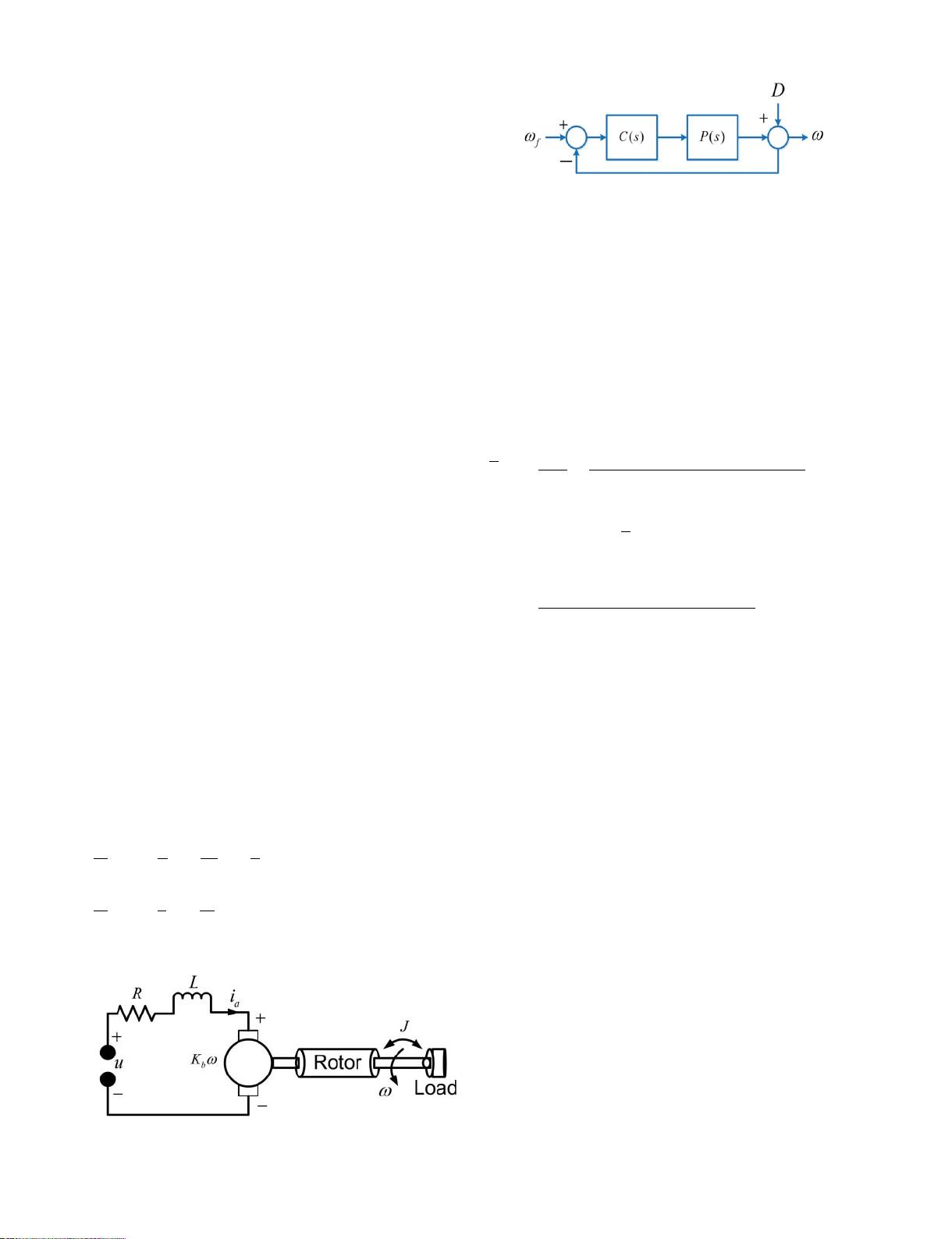
The armature controlled DC servomotor model, as
shown in Figure 1, has been studied by many authors, to
analyse and optimize its functionality. Its linearized elec-
tromechanical dynamics
1
can be described as
d
dt
i
a
¼
R
L
i
a
K
b
L
v þ
1
L
u (1)
d
dt
v ¼
d
J
v þ
K
t
J
i
a
(2)
where i
a
is the armature winding current, v is the rotor
angular speed, R is the armature winding resistance, L is
the armature winding inductance, K
b
is the back electro-
motive force constant, u is the armature winding input
voltage, K
t
is the torque constant, J is the system moment
of inertia, and d is the system damping coefficient. From
(1) and (2), the DC motor can be expressed in a linear
time invariant and single-input single-output (SISO)
system and can be described by a rational proper trans-
fer function:
PsðÞ¼
v sðÞ
usðÞ
¼
K
t
JLs
2
þ JR þ dLðÞs þ dR þ K
b
K
t
ðÞ
In PMS set-up, an additional conversion gain h is
commissioned with
PsðÞ. Therefore, the complete model
can now be written as:
Ps
ðÞ
¼
K
JLs
2
þ JR þ dLðÞs þ dR þ K
b
K
t
ðÞ
(3)
where K = hK
t
. Here, our objective is to provide a syn-
thesis method to design a controller C(s) in a feedback
configuration (see Figure 2) such that the DC motor
tracks the reference speed without steady-state error and
meets specified control performance. Thus, it is a track-
ing problem in which we need lim
t !1
v tðÞ¼v
f
for
all D where D is disturbance.
3. THEORETICAL BACKGROUND FOR
CONTROLLER DESIGN
In this section, we present and analyse some principles
that characterize and help in formulating the controller.
3.1 Fractional-Order System
The fractional calculus is a generalization of integration
and derivation to non-integer order operators. The con-
cept of fractional-order mathematics and system were
planted over 300 years ago, however its potential appli-
cations are traced out from past two decades [33–36].
These days in control system design, the fractional-order
based strategy has become an active field of research but
still it is in initial phase and many aspects are yet to be
Figure 1: Schematic of DC servomotor model
Figure 2: Unity feedback configuration
50 S. SAXENA AND Y. V. HOTE: DESIGN AND VALIDATION OF FRACTIONAL-ORDER CONTROL SCHEME
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-06-18 上传
2021-07-12 上传
2023-07-01 上传
2021-07-13 上传
2021-09-26 上传
2021-07-13 上传

anbeijinwu
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
