模型预测控制详解:动态决策与闭环优化
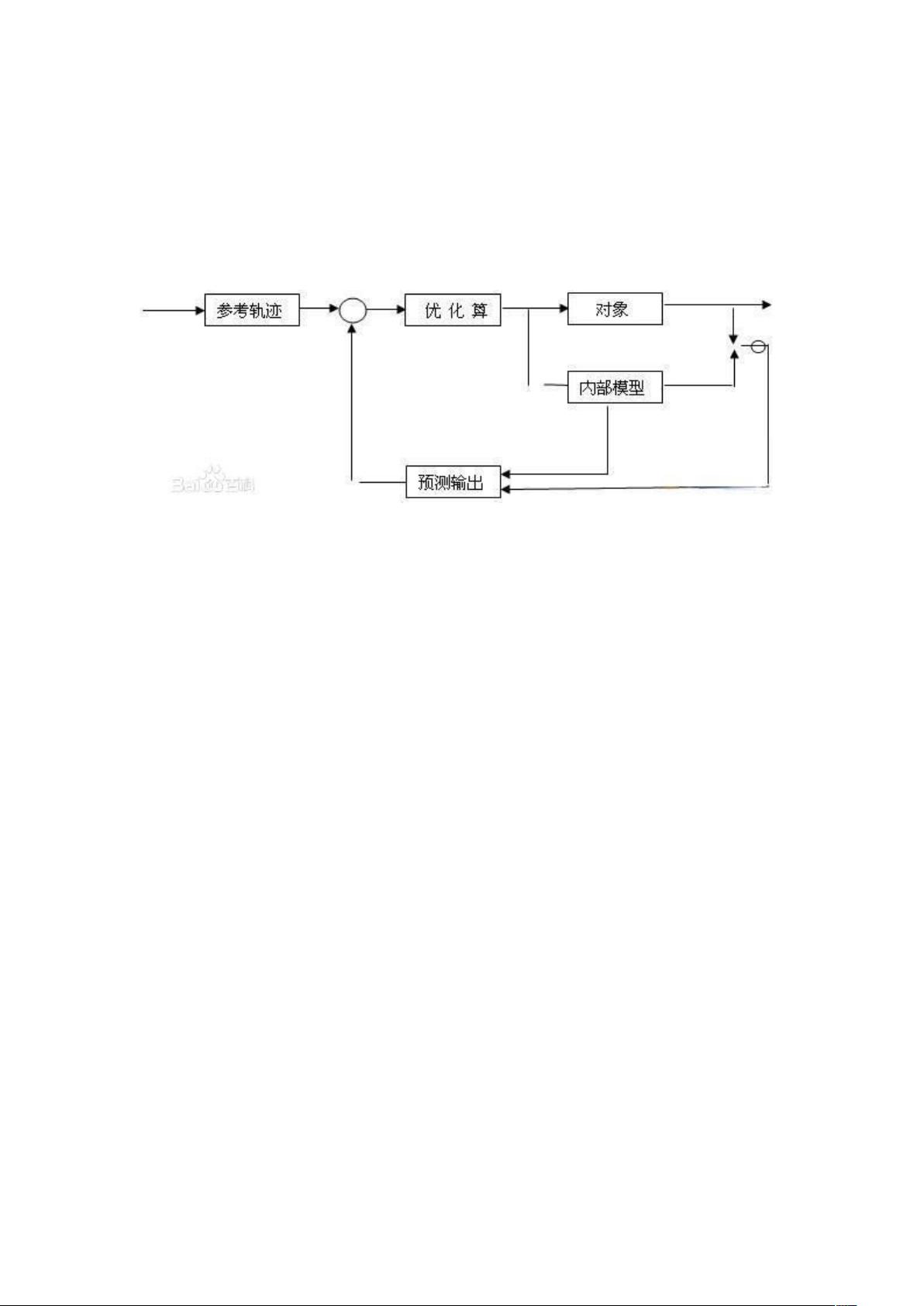
模型预测控制(MPC)是一种先进的控制策略,其核心理念是通过在每个采样周期内解决一个有限时域的开环最优控制问题来确定当前的控制动作。它区别于传统的控制方法,后者通常依赖于预先计算好的控制律。MPC的关键组成部分包括:
1. 预测模型:MPC依赖于一个能够描述系统动态行为的模型,如单位脉冲响应曲线(MAC)或阶跃响应曲线(DMC)。这些模型用于预测未来系统输出,使得控制器可以在多种控制策略间进行比较,评估其效果。尽管非参数模型可能精度不高,但它们易于获取且数据冗余较大,有助于提高系统的抗干扰能力。
2. 反馈校正:实际操作中,由于非线性、模型不匹配和外部干扰的存在,预测值往往与实际输出不符。MPC通过将测量值与预测值对比,计算出预测误差,并用此误差调整模型的预测,实现了反馈机制,增强了系统的鲁棒性和抗扰动能力,使之成为一种闭环优化控制策略。
3. 滚动优化:MPC的优化过程并非一次性完成,而是采用滚动优化策略。在每个采样周期,控制器会针对未来一段有限时间内的性能指标进行优化,这个过程是在线进行的。这样做的好处是能够快速适应环境变化,实时调整控制策略,提高了系统的灵活性和动态响应能力。
总结来说,模型预测控制是一种基于预测的闭环优化控制技术,它结合了系统模型、反馈机制和滚动优化,适用于对动态性能要求高的系统,如化工、电力、航空航天等领域,能有效应对复杂多变的工业环境。
什么是模型预测控制?一种基于对受控对象进行预测的控制方法。
A:模型预测控制(MPC)是一类特殊的控制。它的当前控制动作是在每一个采样瞬间通过
求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状
态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算
法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型
无关,但是实现则与模型有关。
模型预测控制的基本组成
A:
1)预测模型
预测控制应具有预测功能,即能够根据系统的现时刻的控制输入以及过程的历史信息,
预测过程输出的未来值,因此,需要一个描述系统动态行为的模型作为预测模型。
在预测控制中的各种不同算法,采用不同类型的预测模型,如最基本的模型算法控制
(MAC)采用的是系统的单位脉冲响应曲线,而动态矩阵控制(DMC)采用的是系统的阶跃响
应曲线。这两者模型互相之间可以转换,且都属于非参数模型,在实际的工业过程中比较
容易通过实验测得,不必进行复杂的数据处理,尽管精度不是很高,但数据冗余量大,使
其抗干扰能力较强。
预测模型具有展示过程未来动态行为的功能,这样就可像在系统仿真时那样,任意的
给出未来控制策略,观察过程不同控制策略下的输出变化,从而为比较这些控制策略的优
劣提供了基础。
(2)反馈校正
在预测控制中,采用预测模型进行过程输出值的预估只是一种理想的方式,在实际过
程中。由于存在非线性、模型失配和干扰等不确定因素,使基于模型的预测不可能准确地
与实际相符。因此,在预测控制中,通过输出的测量值 Y(k)与模型的预估值 Ym(k)进行比
较,得出模型的预测误差,再利用模型预测误差来对模型的预测值进行修正。
由于对模型施加了反馈校正的过程,使预测控制具有很强的抗扰动和克服系统不确定
性的能力。预测控制中不仅基于模型,而且利用了反馈信息,因此预测控制是一种闭环优
化控制算法。
(3)滚动优化
预测控制是一种优化控制算法,需要通过某一性能指标的最优化来确定未来的控制作
用。这一性能指标还涉及到过程未来的行为,它是根据预测模型由未来的控制策略决定的。
但预测控制中的优化与通常的离散最优控制算法不同,它不是采用一个不变的全局最
优目标,而是采用滚动式的有限时域优化策略。即优化过程不是一次离线完成的,而是反
复在线进行的。在每一采样时刻,优化性能指标只涉及从该时刻起到未来有限的时间,而
下载后可阅读完整内容,剩余4页未读,立即下载
2023-03-31 上传
2021-09-10 上传
2021-09-10 上传
2024-04-06 上传

weixin_44715606
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
