机器人大赛赛程与车体设计解析
版权申诉
159 浏览量
更新于2024-06-23
收藏 5.39MB DOC 举报
"机器人大赛总结.doc"
这篇文档是对一场机器人大赛的总结,主要讨论了参赛机器人设计的关键环节,包括车体设计、机械手设计、翻斗设计以及比赛过程中的策略。作者强调了车体设计的重要性,并详细介绍了车体的构造和布局。
1. 车体设计
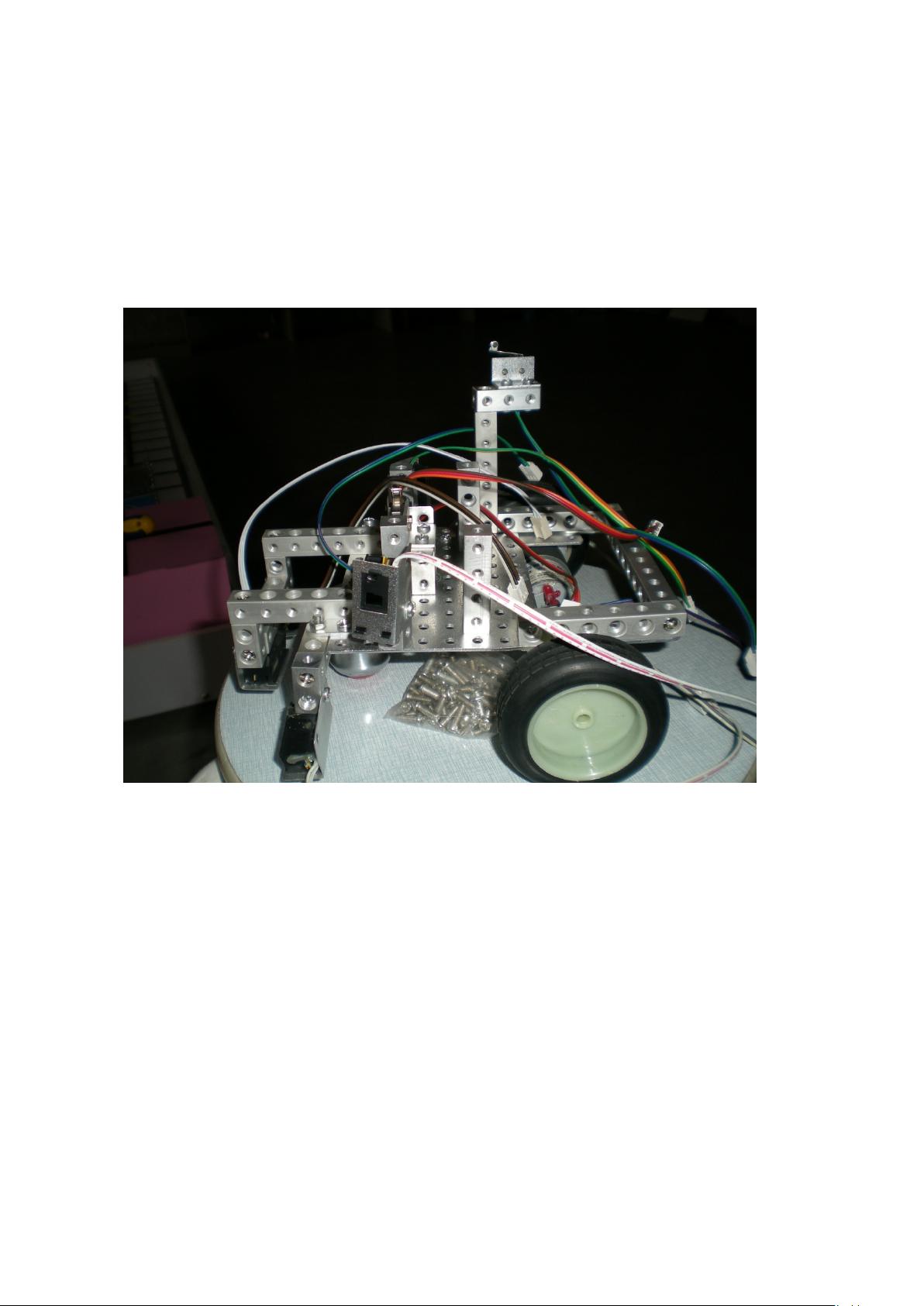
车体设计是机器人性能的基础,考虑到体积限制(500mm*500mm*500mm),作者采用了铝块连接件构建车体,以确保轻便且坚固。车体底盘由带孔铝片和三个连接件组成,形成三支点结构,包括两个动力轮和一个万向轮。动力轮位于车体后部,万向轮在前,这样的布局允许机器人具有更大的灵活性和转向能力。
2. 车体底盘设计
附图一和二展示了车体底盘的不同视角,显示了其结构和组件的分布。这种设计考虑了行走和操控的需求,以及如何有效地安装和布置各种传感器。
3. 车体上部设计
车体上部包含了前保险杠、机械电机和配重电机的安装位置,以及限位和避障传感器的布局。此外,还有控制板和电源的位置。这些设计考虑了任务执行时的稳定性和功能性,确保机器人能在比赛中有效导航和执行任务。
4. 传感器布局
车体底盘上的传感器布局是关键,包括循迹、拐弯、数格和定位等功能。前两个传感器用于循迹,左侧一个用于数格,右侧一个用于转弯,还有一个中间靠右的传感器用于倒车定位。这种全局布置旨在提供机器人在比赛中所需的感知能力,以便于精确控制和避障。
机器人大赛的准备涉及复杂的设计和策略规划。车体设计不仅需要符合规则,还需要适应比赛环境和任务需求,而传感器的合理布局则直接影响到机器人的自主导航和任务执行能力。这份总结揭示了工程设计中的创新思维和实践,为未来类似竞赛提供了有价值的参考。
的上部我有以下几部分的设计:①前保险杠的设计及传感器的安装②机械电机及配
重电机的安装位置③限位传感器及避障传感器的安装位置④控制板及电源的安装位
置。我对车体的布局进行了细致的分析,通过对大赛赛程的分析,在机器人行走中、
完成任务的具体要求以及各个机械部分的协调工作,我对车体的整体布局进行了大
量的分析和研究,我对整个车体进行了安装和设计,最后对车体设计进行了附图进
行详细的、直观的讲解:附图三、附图四、附图五。
4.车体的设计附图四:
图四
补充说明:在车体地盘上我对循迹、拐弯、数格及定位等功能的传感器进行了
全局的布置,通过在实际任务中需要实现的任务以及基本的实际功能,我对传感器
的布局如下:前方的两个为循迹传感器、左面一个为数格传感器、右面一个为转弯
使能传感器及中间靠右的一个为倒车定位传感器。在设计要求上根据前后左右的灵
活度,在拐弯过程中拐弯使能传感器的位置与后轮的距离是通过数学模型来确定位
置,以及左右传感器的位置是通过在调试过程中细心地观察和机器人完成任务的情
况,最后确定了底盘上传感器的精确位置。
对上面的叙述进行图片详细的解析:附图一、附图二。
5.车体的整体设计附图五:
剩余14页未读,继续阅读
2021-10-11 上传
2023-07-13 上传
2022-06-30 上传
2022-07-12 上传
2023-07-12 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
