"基于圆锥曲线和直线融合特征的长焦相机高精度标定方法研究"
版权申诉
32 浏览量
更新于2024-02-29
收藏 1.57MB DOCX 举报
Abstracting at the bottleneck of telephoto camera calibration, a novel calibration method based on conics and line fusion features is proposed in this study. The article explores the formation mechanism of ill-conditioned calibration equations of telephoto cameras and designs a concentric half-circle planar template based on the unique properties of perspective transformation, such as invariant cross ratios and invariant tangents. By combining the normalized line homography estimation method and partial regularity estimation theory, the high-precision and robust initial values of the internal and external parameters of telephoto cameras are solved.
Taking into account the influence of lens distortion, the method introduces the line segment integral distance measure and uses the minimization of the distance from the model line to the projection plane as the objective function. Nonlinear iterative optimization algorithms are then employed to solve the calibration parameters. Simulation and experimental results demonstrate the correctness and effectiveness of the proposed telephoto camera calibration method. Furthermore, compared to traditional calibration methods, the proposed method exhibits superior calibration accuracy and robustness.
In conclusion, the proposed calibration method based on conics and line fusion features effectively addresses the existing challenges in telephoto camera calibration. By leveraging the unique properties of conic curves and lines in perspective transformation, the method achieves high precision and robust solutions for the internal and external parameters of telephoto cameras. The introduction of the line segment integral distance measure further enhances the calibration accuracy, making the proposed method more effective and reliable. Overall, the study contributes significantly to the advancement of telephoto camera calibration technology and provides a solid foundation for future research in this field.
式中:A
x
、A
y
、A
z
分别表示组成姿态矩阵的绕 x、y、z 轴的旋转欧拉角。
像点关于相机内外参数以及三维控制点的法方程系数阵可表示为
NK=JΛ(1σ2I)JTΛ,(4)NK=JΛ1σ2IJTΛ,(4)
式中:J
Λ
= [JT1JT2…JTn]TJT1JT2…JTnT;σ 为单位权中误差;I 为单位矩阵。为简化分析,假定
同精度独立观测,则对应的协方差矩阵为
DK=σ2N−1K
。
(5)DK=σ2NK-1。(5)
随机变量 X、Y 的相关性可采用变量间的相关系数描述,相关系数定义如下:
ρ=σXYD(X)√D(Y)√=σXYσXσY,−1≤ρ≤1,(6)ρ=σXYD(X)D(Y)=σXYσXσY,-1≤ρ≤1,(6)
式中:σ
X
、σ
Y
分别为随机变量 X、Y 的标准差;σ
XY
为随机变量 X、Y 的协方差;D(X)、D(Y)分
别为变量 X、Y 的方差。综合式(5)、(6)即可计算得到相机内外参数间的相关系数。采用数
值仿真显式观察内外参数相关性随焦距变化的趋势。
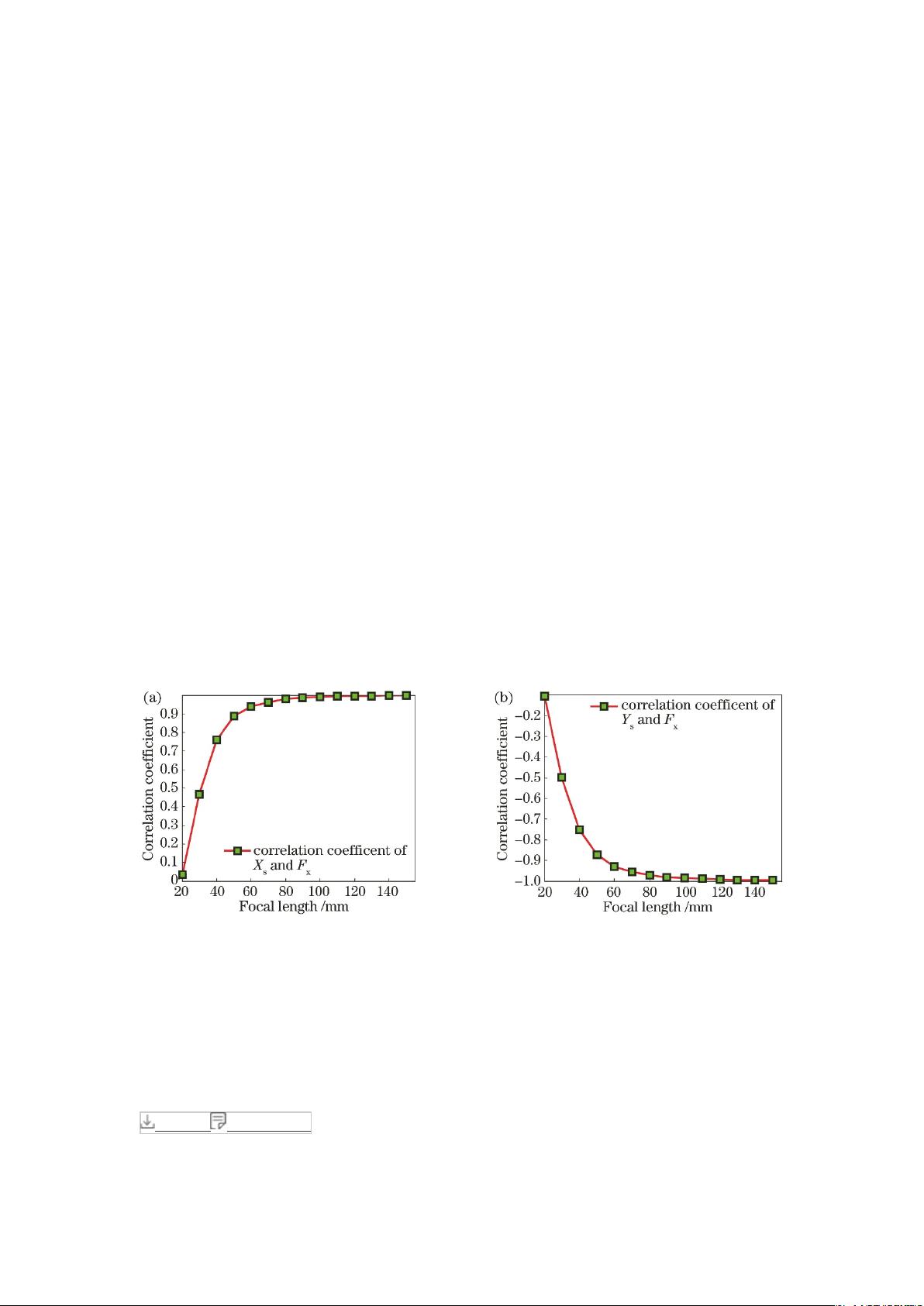
假定相机分辨率为 1024 pixel×1024 pixel,像元尺寸为 5 μm,给定相机位姿并随机生成视场
内均匀分布的 20 个三维点,成像焦距以间隔 10 mm 从 20 mm 增加至 150 mm,根据理想透
视投影成像模型生成理想像点,并叠加服从高斯分布的像点噪声。计算相机内外参数间的相
关系数,并在每个焦距水平下重复 200 次实验。图 2 给出了有代表性的相机平移分量与等效
焦距的相关系数随焦距增大的变化趋势。
图 2. 相机平移分量与等效焦距的相关系数随焦距的变化。 (a) x 方向平移分量;(b) y 方向
平移分量
Fig. 2. Correlation coefficient between translation component and equivalent focal
length of camera varying with focal length. (a) Translation component in x direction;
(b) translation component in y direction
下载图片 查看所有图片
剩余18页未读,继续阅读
207 浏览量
171 浏览量
2023-02-23 上传
2024-08-31 上传
2023-02-23 上传
2024-08-31 上传

罗伯特之技术屋
- 粉丝: 4570
 我的内容管理
展开
我的内容管理
展开







最新资源
- 隐私数据清洗工具Java代码实践教程
- UML与.NET设计模式详细教程
- 多技术领域综合企业官网开发源代码包及使用指南
- C++实现简易HTTP服务端及文件处理
- 深入解析iOS TextKit图文混排技术
- Android设备间Wifi文件传输功能的实现
- ExcellenceSoft热键工具:自定义Windows快捷操作
- Ubuntu上通过脚本安装Deezer Desktop非官方指南
- CAD2007安装教程与工具包下载指南
- 如何利用Box平台和API实现代码段示例
- 揭秘SSH项目源码:实用性强,助力开发高效
- ECSHOP仿68ecshop模板开发中心:适用于2.7.3版本
- VS2012自定义图标教程与技巧
- Android新库Quiet:利用扬声器实现数据传递
- Delphi实现HTTP断点续传下载技术源码解析
- 实时情绪分析助力品牌提升与趋势追踪:交互式Web应用程序
