MSP430驱动的智能小车:避障寻迹与算法优化
需积分: 9 69 浏览量
更新于2024-07-24
1
收藏 932KB DOC 举报
本文档探讨的是"智能小车设计方案",该方案聚焦于利用MSP430超低功耗单片机作为核心控制器,构建一种具有自主反应特性的智能小车。这种智能系统广泛应用于自动化控制领域,通过智能化的方式提升电路分析和验证的效率,体现了其研究与开发的重要价值。
在硬件层面,设计者基于SHARK二型小车的基础,对小车的机械结构进行了创新。特别地,通过采用一个万用轮替代传统的两个前轮,提高了小车的转向灵活性。智能小车配备了反射式红外传感器用于路径跟踪,通过调整单片机产生的脉冲宽度调制(PWM)信号的占空比,使得小车能够在设定范围内精确地沿着黑线行驶,并实现对不同角度的适应性移动。同时,红外一体化接收头被用来检测障碍物的位置,确保小车在遇到障碍时能够做出准确的反应并及时避障。
在算法设计方面,该方案运用了矢量分解法和PID(比例积分微分)控制算法。矢量分解法有助于将复杂的运动控制问题分解为多个独立的控制任务,而PID算法则可以根据小车实际运行状态实时调整参数,以优化行驶轨迹,提高行驶精度和稳定性。这些算法的集成使得小车在执行寻迹和避障任务时表现得更为高效和精准。
这篇论文深入研究了如何通过MSP430单片机驱动的智能小车系统,结合优化的机械结构和先进的控制算法,实现障碍检测、避障和路径追踪功能。这不仅展示了作者对于智能控制系统的研究能力,也为未来同类小车的设计提供了实用的技术参考。关键词如"寻迹"、"避障"和"PWM",都强调了论文的核心技术内容。
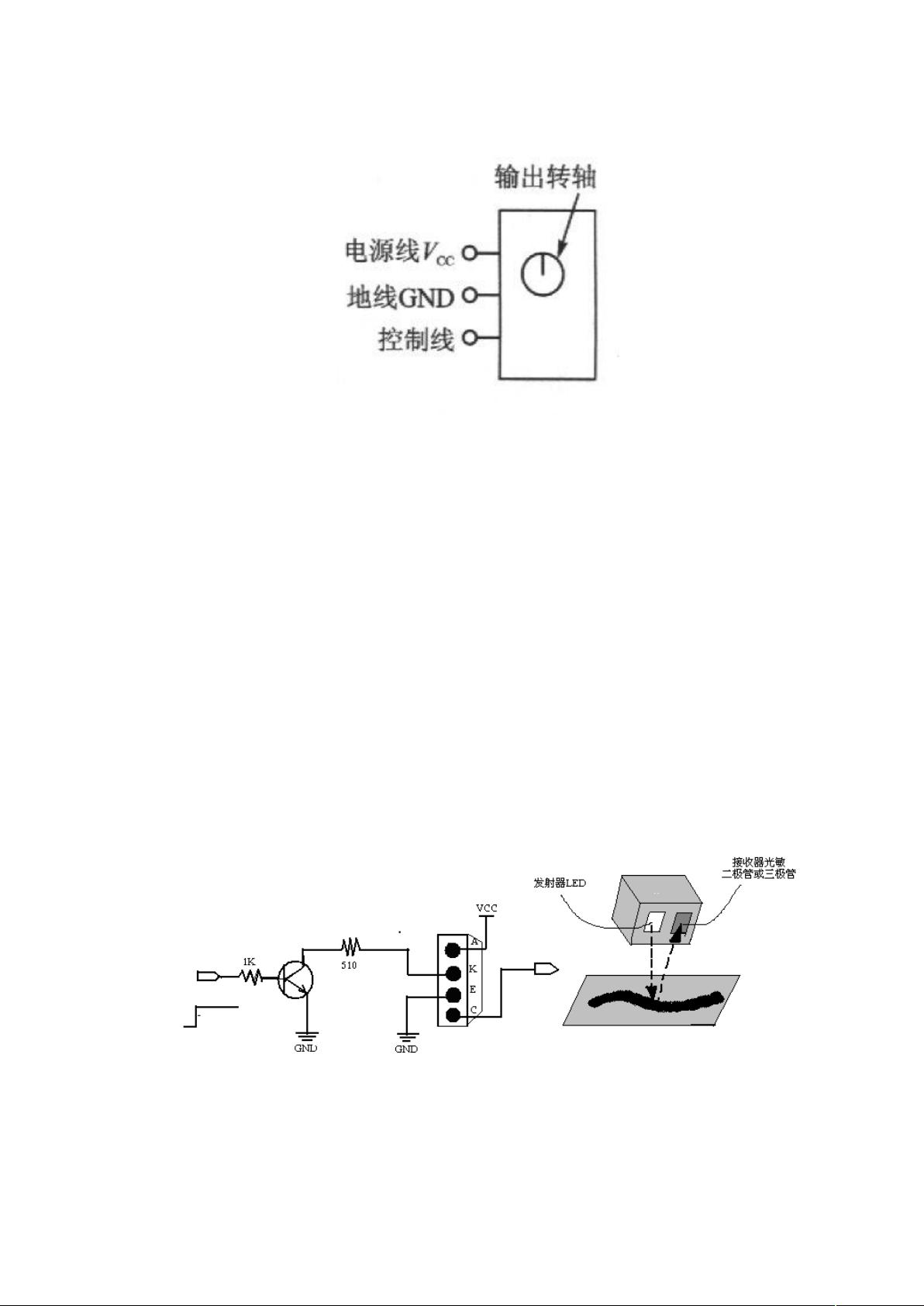
准的舵机有 3 条导线,分别是:电源线、地线、控制线,如图所示。
电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压
通常介于 4~6V,一般取 5V。注意,给舵机供电电源应能提供足够的功率。
控制 线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为
20 ms(即频率为 50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改
变,角度变化与脉冲宽度的变化成正比。
2.3 反射式红外传感器
反射式红外传感器 ST188 采用高发射功率红外光电二极管和高灵敏度光电
晶体管组成。检测距离可调整范围为 4-15mm;采用非接触检测方式。可用
于 IC 卡电度表脉冲数据采集、集中抄表系统数据采集和传真机纸张检测等。
图 2.4 反射式红外传感器工作原理
剩余34页未读,继续阅读
2013-09-06 上传
2021-04-20 上传
2009-10-26 上传
2022-06-17 上传
2008-10-14 上传
2023-10-18 上传
2021-04-25 上传
2022-12-25 上传
2020-08-14 上传

werqi13
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
