PCD2112用户手册:串行总线脉冲控制LSI
需积分: 10 2 浏览量
更新于2024-07-31
收藏 731KB PDF 举报
"PCD2112用户手册.pdf"
该文档是关于PCD2112脉冲控制芯片的用户手册,由Nippon Pulse Motor Co., Ltd.编写。此LSI芯片主要用于通过一个4线串行总线接口与CPU进行通信,作为一个脉冲发生器。手册的目的是帮助用户熟悉PCD2112的功能和操作。
手册包含了以下关键内容:
1. **引言(Preface)**:感谢用户选择使用PCD2112串行总线脉冲控制LSI,并提醒用户在使用前应仔细阅读手册以了解产品。
2. **注意事项(Precautions)**:
- 未经事先书面许可,禁止全部或部分复制、传输本手册。
- 为提高产品性能或质量,手册中的规格可能会在无预先通知的情况下变更。
- 手册制作虽已尽力确保准确,但如有疑问、错误或遗漏,请及时联系厂商。
- 日本脉冲电机公司不对因使用本手册而导致的任何结果负责,即使在报告了问题或错误后。
3. **终端和信号名称**:手册中以井字号(#)开头的终端和信号名称表示它们使用负逻辑。
4. **处理预防措施(Handling Precautions)**:这部分可能包含有关如何正确安装和操作PCD2112的详细信息,包括安全指南和操作步骤。虽然在提供的内容中没有详细列出,但通常会涵盖电气连接、接地、防静电措施等重要事项。
5. **技术规格**:手册可能提供了PCD2112的详细技术参数,如工作电压、电流消耗、脉冲频率范围、串行总线协议、引脚配置等。
6. **应用示例**:为了帮助用户理解如何在实际系统中使用PCD2112,手册可能包含了一些应用示例和电路图。
7. **故障排除**:提供了解决使用过程中可能出现的问题的指南,帮助用户诊断和修复故障。
8. **编程和配置**:如果PCD2112支持编程或配置,手册将详细介绍如何进行设置和修改参数。
9. **支持和服务**:手册可能还包括供应商的联系方式,以便用户在遇到问题时寻求技术支持或售后服务。
PCD2112用户手册是全面了解和有效利用这款脉冲控制LSI芯片的重要参考资料,涵盖了从基本操作到高级应用的广泛内容。
DA70115-1/2E
- 9 -
Note: The table above shows the signals classified according to their functions. Some terminals have
multiple functions and therefore the same terminal numbers appear more than once.
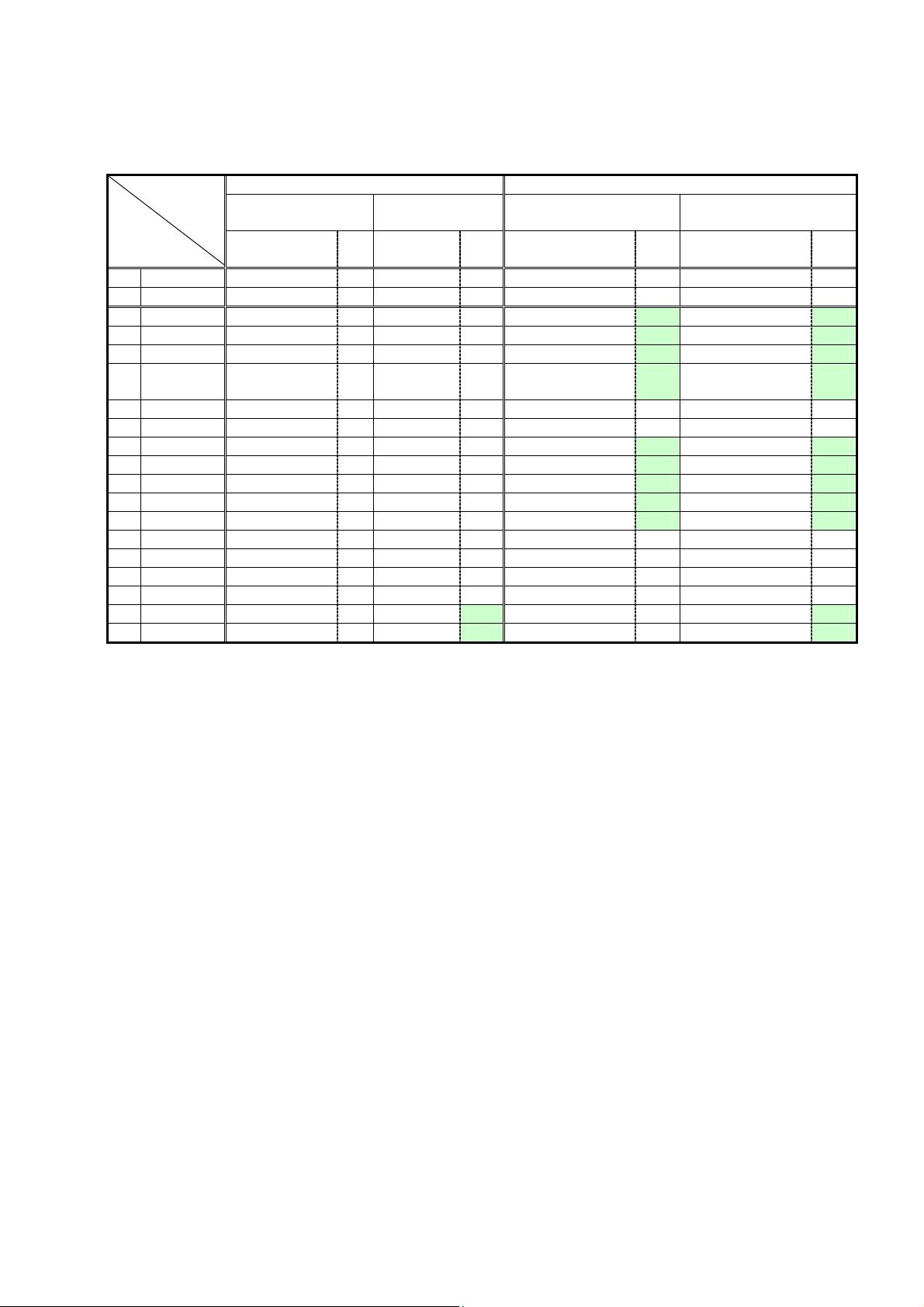
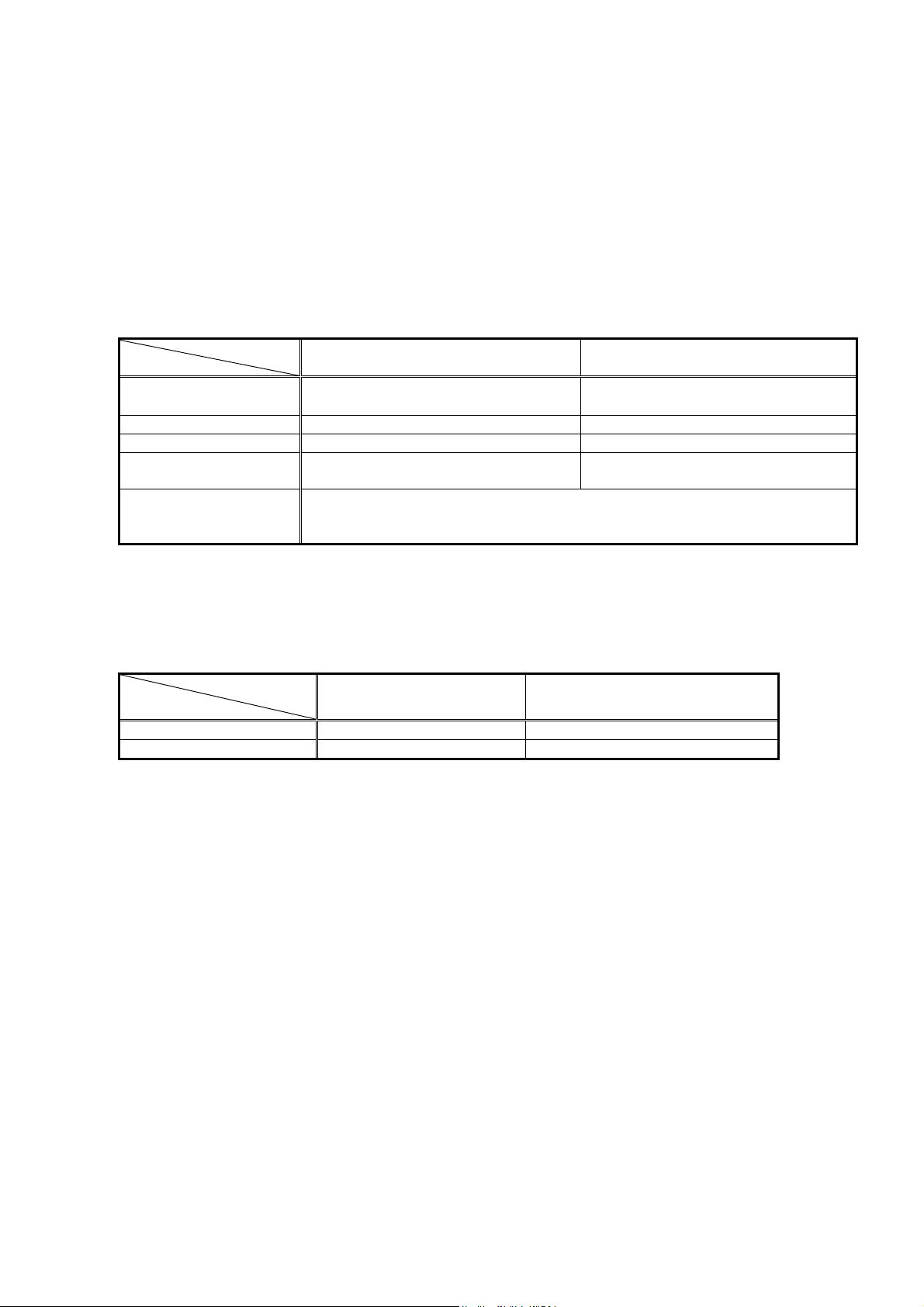
3-2. Terminal functions in each system mode
The functions of the following terminal depend on the mode selected.
Connected to a CPU Stand alone operation
Pulse train output
Excitation
sequence output
Pulse train output
Excitation sequence
output
System
mode
Terminal
name
Terminal
function
I/O
Terminal
function
I/O
Terminal
function
I/O
Terminal
function
I/O
5 MODE (LOW) I (LOW) I (HIGH) I (HIGH) I
33 MTYP (LOW) I (HIGH) I (LOW) I (HIGH) I
40 SCK I I O O
35 DI I I O O
36 DO O O I I
38 #CS I I
(Same as
#CSO)
O
(Same as
#CSO)
O
44 A0/PS0 A0 I A0 I PS0 I PS0 I
45 A1/PS1 A1 I A1 I PS1 I PS1 I
46 PS2 Note 3 I Note 3 I PS2 I PS2 I
47 PS3 Note 3 I Note 3 I PS3 I PS3 I
48 PS4 Note 3 I Note 3 I PS4 I PS4 I
1 P0 P0 I/O P0 I/O Note 3 O Note 3 O
2 P1 P1 I/O P1 I/O Note 3 O Note 3 O
24 UB (LOW) I UB I (LOW) I UB I
23 INP/FH INP I FH I INP I FH I
26 OUT/PH1 OUT O PH1 O OUT O PH1 O
27 DIR/PH2 DIR O PH2 O DIR O PH2 O
28 P2/PH3 P2 O PH3 O Note 3 O PH3 O
29 P3/PH4 P3 O PH4 O Note 3 O PH4 O
Note 1: Empty cells simply mean that the function of these terminals is the same as described in the
terminal name chart. Multiple names in the terminal name chart means that the terminal
function can be selected by the software.
Note 2: LOW and HIGH refer to level applied to the input terminals.
Note 3. Pull these terminals down (5 k to 10 k-ohm resistor).


剩余86页未读,继续阅读
2021-05-16 上传
2022-01-28 上传
2023-12-24 上传
2023-12-24 上传
2023-12-24 上传
2023-12-24 上传
2022-05-20 上传
2023-03-29 上传

elihgt
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
