光波导三向力触觉传感系统:有限元建模与实验验证
版权申诉
147 浏览量
更新于2024-08-10
收藏 178KB PDF 举报
本文主要探讨了一种创新的基于有限元接触变形的光波导三向力触觉传感系统。随着智能机器人技术的快速发展,对传感器的需求日益精密,特别是对于机器人在抓握和移动过程中所感知的三向力,其精确测量具有重要意义。然而,由于直接检测三向力的复杂性,目前市场上相关的传感器解决方案相对较少。
本文作者刘嘉敏、潘英俊和乔生仁,来自重庆大学光电工程学院,他们将传统的光波导单向力触觉传感技术作为出发点,提出了一种新型的光学波导结构,旨在实现三向力的精确感应。他们运用了有限元分析(FEA)这一强大的数值模拟工具,对新型传感系统的理论模型进行了深入研究,并通过仿真实验验证了这一设计的可行性。
有限元分析是一种数值方法,它将复杂的物理问题分解为许多简单的小单元,通过求解这些单元的行为来模拟整体系统的行为。在这个过程中,作者构建了一个数学模型,用于计算当触觉传感头受到三向力作用时,半圆球触头的相应变形情况。这种模型有助于理解力的分布和传感头的响应,从而确保传感器能够准确捕捉并传输力的三维信息。
为了实证这个理论,作者设计了一套专门的实验传感系统,收集了大量的实验数据。这些数据与理论预测高度吻合,强有力地证明了新提出的光波导三向力触觉传感技术方案在实际应用中的有效性和可靠性。通过结合有限元分析的精确性和实验验证的实用性,本文为机器人领域提供了一种有前景的新型触觉感知技术,有望推动智能机器人技术的发展,提升其感知环境和执行任务的能力。
总结来说,本文的核心贡献在于提出了一种新颖的光波导三向力触觉传感技术,通过有限元分析方法解决三向力检测难题,并通过实验验证了其在实际应用中的潜力。这项研究不仅提升了传感器的性能,也为智能机器人在精细操作和环境适应方面的应用开辟了新的可能。
第23卷第3期 仪 器 仪 表 学 报
基于有限元接触变形的光波导三向力触觉传感系统
刘 嘉敏 潘 英俊 乔生 仁
(重庆大 学光 电工程 学院 重庆 400044)
摘要 通过有 限元 分析 方法对一种新型光波 导三 向力触觉传感 系统进 行理论 探 讨 和仿 真实验 ,提 出相应的数学 模型 .并设计
专1]的实验传感 系统 。实验数据结果验 证 了理论分析 ,从而 在理 论和实验 上证明 了该 新型光波导三 向力传 感方案的可行性 。
关键词 自限元分析 光波 导 力传感 机器』、触觉
Optical W ave--guided Three--axis Tactile Sensing System based on FEA in Con--
tact Deform ation
Liu Jiamin Pan Yingjun Qiao Shengren
(Y、he College of Optoelertronics Engineering,Chongqing Univ.一Chongqing 400044一China)
Abstract W ith FEA method.this paper carries on a series of simulation experiment about a newly optical wave—
guided three axis tactile sensing system ,brings forward a corresponding mathem atical model to calculate the
three axis force.A special sensing system is designed for the experiment,and the data conform to the theoretical
analysis considerably.
Key words Finite element analysis Optical wave guide
1 引 言
智能机器人的发展对传感器提出了越来越高的技
术要求 ,触觉 传感作 为机器 人的主要传感方 式之 一已
越来越受到 人们的关 注 。机器 人无论是抓 持或行走
均足三向力在发生作用 ,然而在众多的触觉传感器中 ,
直接检测 三 向力具 有较』c的难 度 .因而三 向力 传感技
术的开发研究仍不多见 本文在光波导单向力触觉传
感技术 的基础 上二,提 出了 一种 新型的光波 导三 向力触
觉传感技 术方案 ,并 利用有限 元方 法分析 了三 向力触
觉传感头 受力后 引起 半圆球 触头变 化的情 况 ,建立起
相应 的数学模型 ,最 后通 过实验 数据对该 三 向力的计
算公式进行 了验证 。
2 传感系统工作原理
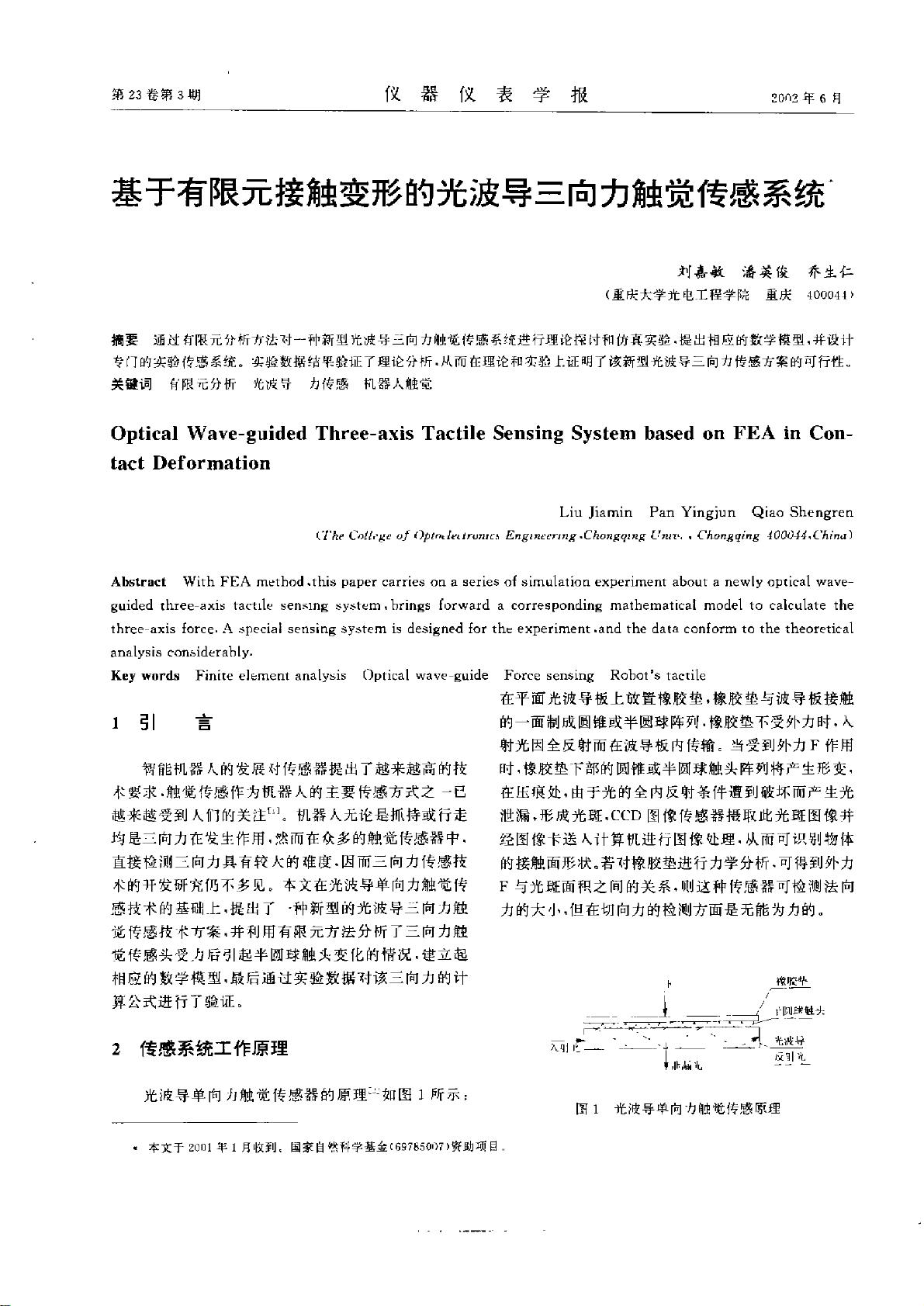
光 波导单 向 力触 觉 传感器 的原理。 如 图 1所示
Force sensing Robot’s tactile
在平 面光波导板上放置橡胶 垫 ,橡胶 垫与波导板 接触
的一面制成 圆锥或半圆球 阵列 ,橡胶垫不受外力时 ,入
射光 因全反射而在波导板 内传输 。当受到 外力 F作用
时 ,橡胶垫下部的圆锥或 半圆球触头 阵列将产生形变 .
在压痕 处,由于光的全 内反射 条件遭 到破坏而产 生光
泄漏 ,形成光斑 .CCD 图像传感器 摄取此 光斑 图像并
经 图像 卡进入计算机进 行图像处理 .从而可识 别物体
的接触面形状 。若对橡胶垫进 行力学分析 .可得到外力
F与光斑 面积之 间的关 系,则这 种传感 器可检 测法 向
力的大小 ,但在切 向力的检测方面是无能 为力的 。
-
本文于 2001年 i月收到 国家 自然科学基金 (69785007)资助项 目。
^
图 1 光波 导 单向力触 觉 恃感 原理
维普资讯 http://www.cqvip.com
下载后可阅读完整内容,剩余4页未读,立即下载
2021-10-01 上传
630 浏览量
962 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

reg183
- 粉丝: 1836
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
