随机张量网络揭示全息对偶:新模型的AdS/CFT特性
56 浏览量
更新于2024-07-16
收藏 1.59MB PDF 举报
"来自随机张量网络的全息对偶"是一篇发表在《Journal of High Energy Physics》(JHEP)第11期的开放获取论文,由Patrick Hayden、Sepehr Nezami、Xiao-Liang Qi、Nathaniel Thomas、Michael Walter和Zhao Yang等作者合作完成。论文发表于2016年,探讨了张量网络在探索全息对偶性中的作用。张量网络因其满足纠缠面积定律而成为研究全息对偶的理想工具,这在阿贝尔-卡斯蒂利亚诺斯/规范场理论(AdS/CFT)对偶中的结构特性有着重要意义。
在文中,作者利用随机张量网络构建模型,这些模型展现出与AdS/CFT对偶相似的特性。他们发现,当张量的键维度增大时,模型中的边界区域纠缠熵遵循 Ryu-Takayanagi 熵公式,这是一个关键的全息性质,它与辅助多部分纠缠密切相关。Rényi熵在模型中的行为也得到了深入研究,并与AdS/CFT中的对应现象进行了对比。
此外,随机张量网络模型揭示了一个重要的概念,即每个边界区域编码了与其对应的“块状纠缠楔”,也就是边界区域及其最小表面所包围的区域的物理信息。作者通过将随机张量的平均值关联到经典铁磁伊辛模型的分配函数,使得最小表面在模型中表现为畴壁,类似于热力学相变中的界面。
进一步地,引入体场后,模型再现了对Ryu-Takayanagi公式的修正,体最小表面不再是简单地对应于边界上的最小面积,而是受到体场纠缠的影响,熵也随之增加。这种体场的纠缠增长最终在拓扑上类似于形成黑洞,改变了最小表面的行为。通过体相关函数的扩展,作者能够计算出更精细的物理量。
这篇论文不仅深化了对随机张量网络在全息对偶性中的理解,还为理论物理学家提供了一个新颖且直观的框架来研究量子引力和量子信息之间的深层次联系。通过这些模型,研究者们可以探索更复杂的全息现象,以及边界理论和引力理论之间的相互作用。"
JHEP11(2016)009
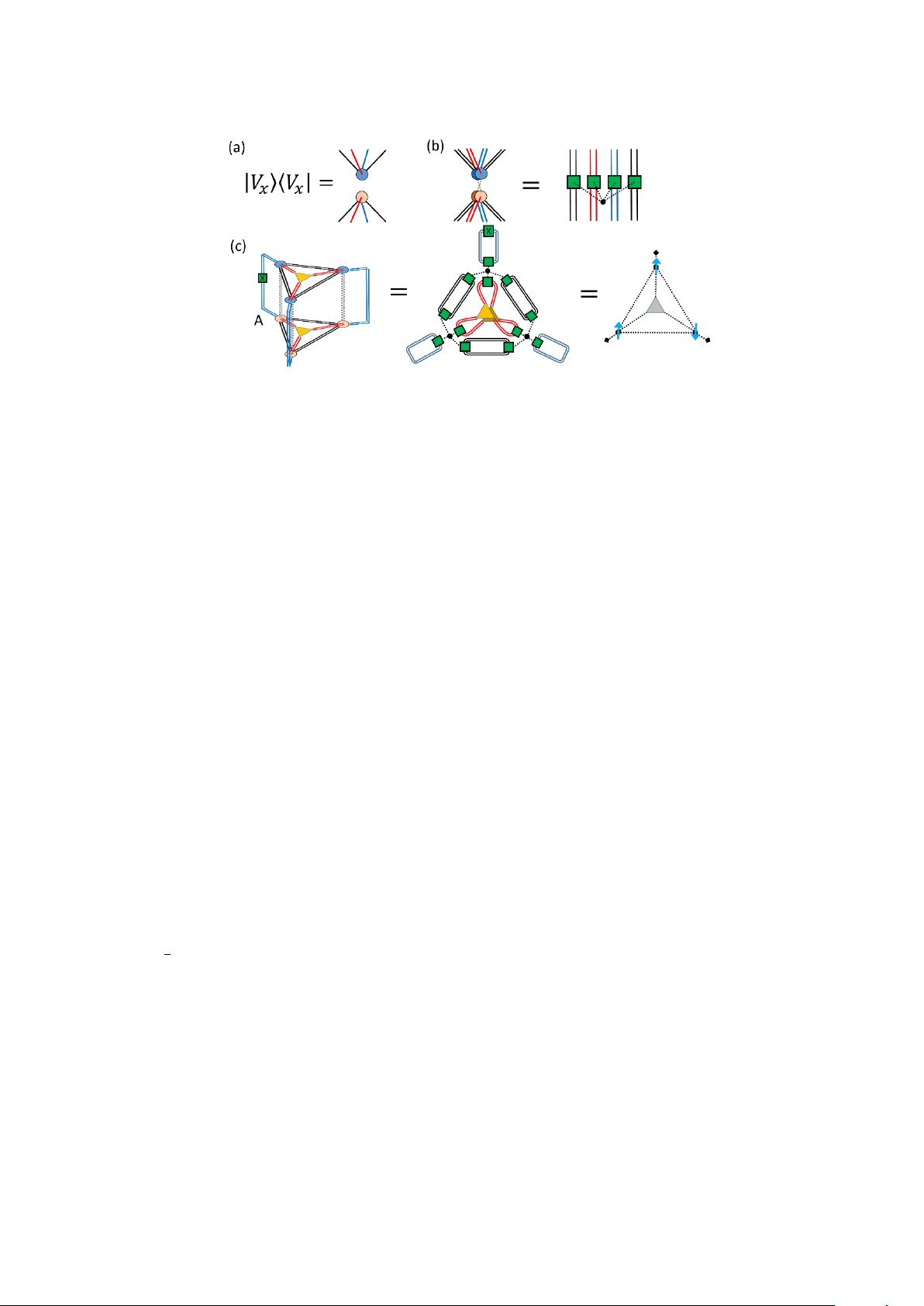
Figure 2. (a) Graphic representation of the single site density operator |V
x
ihV
x
| for a vertex in
the tensor network shown in figure 1. (b) The average over the state |V
x
ihV
x
| ⊗ |V
x
ihV
x
| in the
Hilbert space (see eq. (2.11)). On the right side of the equality, the dashed line connected to the
black dot stands for a sum over an Ising variable s
x
= ±1. When s
x
= 1 (s
x
= −1), each green
rectangle represents an operator I
x
(F
x
), respectively. (c) The state average of Z
1
in eq. (2.10) for
the simple tensor network shown in figure 1. We consider a region A consisting of a single site,
and the green rectangle with X represents the swap operator F
A
. After contracting the doubled
line loops one obtains the partition function of an Ising model, with the blue arrows representing
the Ising variables. The dashed lines in the right of last equality represent three different terms
in the Ising model contributed by the links, the bulk state (middle triangle) and the choice of
boundary region A.
That is, the typical second R´enyi entropy is given by the difference of the two free energies,
i.e., the “energy cost” induced by flipping the boundary pinning field to down (−1) in
region A, while keeping the remainder of the system with a pinning field up (+1).
In summary, what we have achieved is that the second R´enyi entropy is related to
the partition function of a classical Ising model defined on the same graph as the tensor
network. Besides the standard two-spin interaction term, the Ising model also has an
additional term in its energy contributed by the second R´enyi entropy of the bulk state
ρ
b
, and the Ising spins at the boundary vertices are coupled to a boundary “pinning field”
h
x
determined by the boundary region A. If the bulk contribution from ρ
b
is small (which
means major part of quantum entanglement of the boundary states is contributed by the
tensor network itself), one can see that the parameters log D
xy
and log D
x∂
determine
the effective temperature of the Ising model. For simplicity, in the following we assume
D
xy
= D
x∂
= D for all internal legs and boundary dangling legs. In this case we can take
β =
1
2
log D as the inverse temperature of the classical Ising model.
3 Ryu-Takayanagi formula
Once the mapping to the classical Ising model is established, it is easy to see how the
Ryu-Takayanagi formula emerges. In the large D limit, the Ising model is in the low-
temperature long-range ordered phase (as long as the bulk has spatial dimension ≥ 2), so
that the Ising action can be estimated by the lowest energy configuration. The boundary
– 9 –


剩余55页未读,继续阅读
120 浏览量
113 浏览量
2020-03-24 上传
118 浏览量
137 浏览量
137 浏览量
122 浏览量
2020-04-24 上传
128 浏览量

weixin_38602563
- 粉丝: 3
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- GDI方式实现图片拼接-易语言
- django-project-template:模板personalizado para criar novos projetos com o framework Django
- 安卓双机(两个手机)wifi下socket通信(client输入,在server端显示)
- 我的figma设计
- 手机端PC端视频播放
- javaScript-quiz-app:来自定义数组的应用显示问题
- JS+CSS+Bootstrap+PHP学习帮助文档chm.zip
- Denwa Click-To-Call-crx插件
- yeoman-coffee-jade-template:带有 grunt、coffee、jade、livereload 和其他一些实用程序的 Webapp 前端模板
- sevhou.github.io:个人网站
- html-css-toboolist
- Solar-System:虚拟太阳系
- TestThreadApp.rar
- 易语言gdi+实现拼接图片-易语言
- Dedup Tabs-crx插件
- 迅捷fw300um无线网卡驱动 官方最新版
