模型算法控制程序实践:MATLAB仿真
需积分: 19 93 浏览量
更新于2024-09-11
5
收藏 77KB DOC 举报
"模型算法控制程序是预测控制课程的一个实践示例,通过程序代码加深了对模型算法控制的理解。该文档涉及双输入双输出纯时延对象的控制,使用MATLAB进行建模和控制器设计。"
在控制理论与工程领域,模型算法控制(Model Predictive Control, MPC)是一种先进的控制策略,它利用系统模型对未来行为进行预测,并基于这些预测来制定最优控制决策。这种方法允许考虑到系统约束,同时优化长期性能,因此在化工、能源、汽车等领域广泛应用。
文档首先给出了一个双输入双输出系统的传递函数矩阵,这是一个离散时间的系统模型。MATLAB中的`poly2tfd`函数用于将传递函数转换为适合MPC的传递函数模型。例如,`g11=poly2tfd(12.8,[16.71],0,1)`表示转换第一个输入到第一个输出的传递函数。接着,`tfd2step`函数将传递函数模型转换为阶跃响应模型,以便进行预测控制。
采样周期`delt`定义了系统更新控制器决策的频率,`ny`是输出维度,`tfinal`是截断时间,它们共同决定了预测模型的构建。然后,通过`cmpc`函数设计模型预测控制器,设定预测时域长度`p`、控制时域长度`m`以及输入约束和参考轨迹。`cmpc`函数进行优化计算,生成最优控制序列,并返回仿真结果。
文档的第二部分展示了另一个系统的控制过程,同样是使用MATLAB进行建模和控制设计,但这次使用了`scmpc`函数,这是适用于连续时间系统的MPC函数。这个例子中,系统约束通过`ulim`和`ylim`设置,同时参考轨迹和输出也进行了设定。
通过`plotall`函数,输出了闭环系统的控制量和输出变量随时间的变化曲线,这些图形有助于分析系统的动态行为和控制效果。模型预测控制的优势在于,即使在存在约束和多变量复杂系统的情况下,也能提供有效的控制策略。
总结来说,该文档通过MATLAB程序实例演示了如何应用模型算法控制对双输入双输出纯时延系统进行建模和控制设计,展示了MPC在处理时变系统和满足约束条件方面的优势。通过这种方式,学习者可以更好地理解和掌握模型算法控制的基本原理和实现步骤。
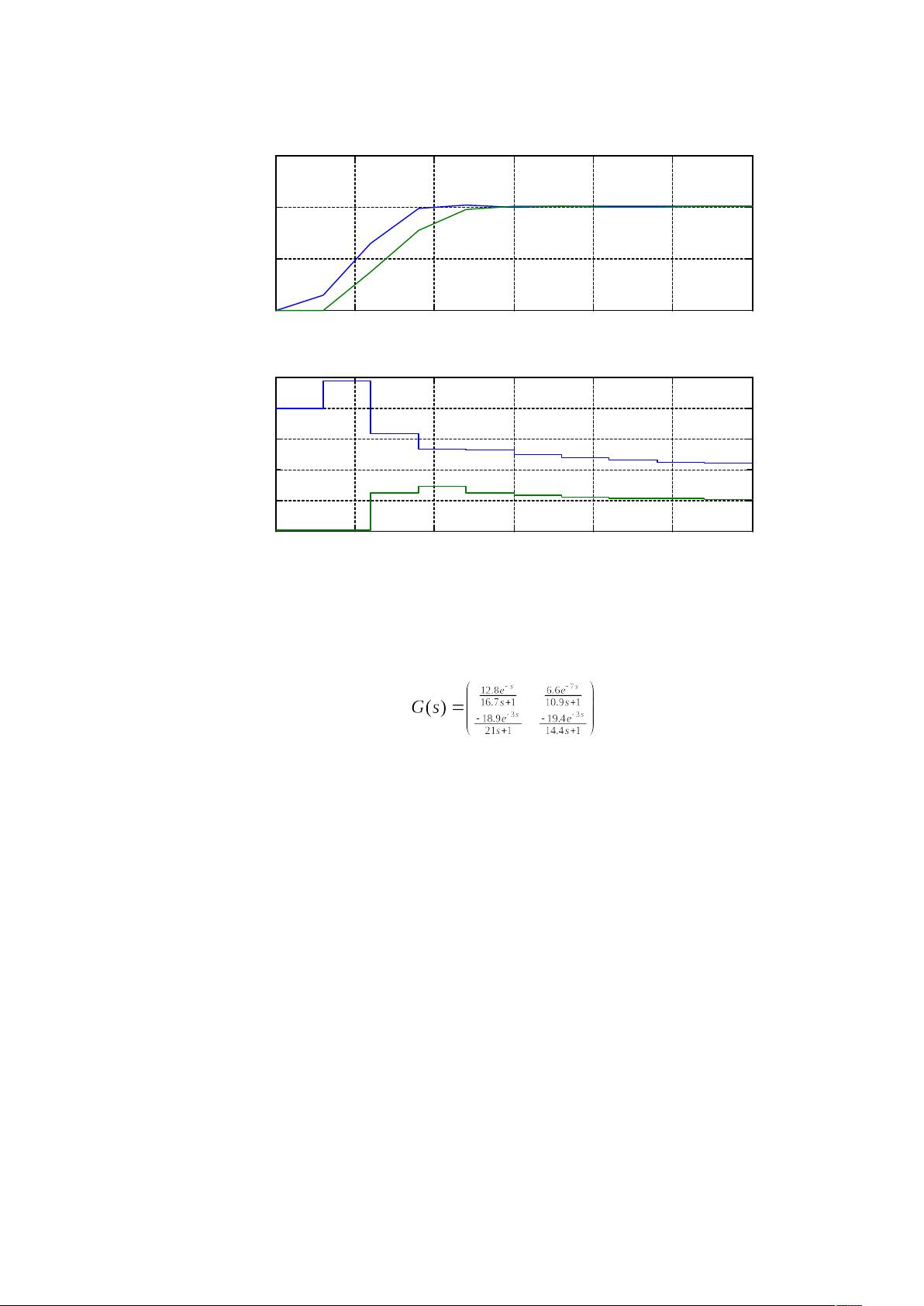
2.设系统的传递函数矩阵为:
解:MATLAB 程序如下:
g11=poly2tfd(12.8,[16.7 1],0,1);
g12 = poly2tfd(6.6,[10.9 1],0,7);
g21 = poly2tfd(-18.9,[21.0 1],0,3);
g22 = poly2tfd(-19.4,[14.4 1],0,3);
delt=3;
ny=2;
imod = tfd2mod(delt, ny, g11, g12,g21,g22);
pmod=imod;
p=6;m=2;
ywt=[];uwt=[1 1];
tend=30;
r=[0 1];
ulim=[-inf -0.15 inf inf 0.1 100];
ylim=[];
[y,u,ym]=scmpc(pmod,imod,ywt,uwt,m,p,tend,r,ulim,ylim);
plotall(y,u,delt)
0 5 10 15 20 25 30
0
0.5
1
1.5
Outputs
Time
0 5 10 15 20 25 30
-0.1
-0.05
0
0.05
0.1
Manipulated Variables
Time
剩余13页未读,继续阅读
2021-05-31 上传
2021-09-10 上传
2024-03-10 上传
2021-07-10 上传
2018-07-20 上传

北极熊1002
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
