激光雷达探测技术解析:APD、SPAD与SiPM
版权申诉
"该文档是关于激光雷达技术中使用的不同类型的探测器——APD(雪崩光电二极管)、SPAD(单光子雪崩二极管)和SiPM(硅光电倍增管)的分析。文档包含了LiDAR的基本术语和定义,包括激光雷达的分类、关键性能指标以及点云相关概念。此外,还讨论了激光雷达的探测概率、帧率、盲区、最大探测距离、视场角和精度等重要参数。"
激光雷达(LiDAR)是一种利用激光光束探测目标并获取其三维信息和速度的技术。根据扫描方式,LiDAR可以分为机械旋转、半固态和固态三类。机械旋转LiDAR依靠电机驱动的旋转阵列进行全方位扫描,而半固态和固态LiDAR则使用微振镜、转镜或光学相控阵(OPA)、闪光(Flash)、连续波(FMCW)等非机械方法实现部分视场角的探测。
点云是LiDAR系统收集到的三维空间中的离散点集,包含位置、反射率和时间戳等信息。在点云处理中,噪点和拖点是常见的问题。噪点是指不存在真实目标但出现在点云中的点,而拖点则是由于激光束在相邻物体边缘产生的虚假交点。
LiDAR的性能指标至关重要,探测概率(POD)衡量实际回波与理论回波的匹配程度,即检出率。帧率是系统对同一目标点进行探测的频率,例如10Hz或20Hz。盲区是LiDAR能稳定输出满足精度要求的点云的最小距离,而最大探测距离是能得到回波的最远距离。视场角(FOV)定义了点云覆盖的空间角度,分为水平(HFOV)和垂直(VFOV)两个方向。角分辨率是LiDAR区分相邻物体间最小角度的能力,而精度则描述了在重复测量下测量值的一致性,通常通过标准差(σ)来表示。
APD、SPAD和SiPM是LiDAR系统中常用的探测器类型。APD具有较高的增益和响应速度,适合高速应用;SPAD能够检测单个光子,特别适合低光照环境;SiPM则提供高灵敏度和良好的噪声性能,常用于远距离探测。这些探测器的选择取决于应用场景的需求,如探测距离、环境光照条件、功耗和成本等因素。

3. 成像方法
3.1 三角测量法,Triangulation
三角测量法利用三角法来提取 3D 空间信息,在同一个场景,已知两个摄像头的距离 d,
通过两张二维图像来进行距离信息的提取从而构成三维图像;
利用立体视差算法来处理图像并计算目标的距离, 人眼就是通过这样的方式来获取深度
信息,两个摄像头类比人的两个眼睛;
立体视觉的优势在于它以简单的被动方式,实现了高分辨率和全范围图像的同时采集,使
用传统的相机就可以了;
然而,这种方法需要解决所谓的对应问题(点对的识别,它们是场景中同一点的投影),
所以算法成本很高,并且帧率有限;
此外,立体视觉算法鲁棒性比较差,事实上,如果附近的物体覆盖了两幅图像之一中的远
处物体,它就会失败,无法测量更远的距离,并且三维图像会丢失信息;
最大满量程 (FSR) 取决于两个相机之间的基线,基线越大,范围越长,感应范围也越远。
所以目前基于立体视觉成像的相机,工作距离为 3 - 5 m 左右,并不能看到很远的地方;
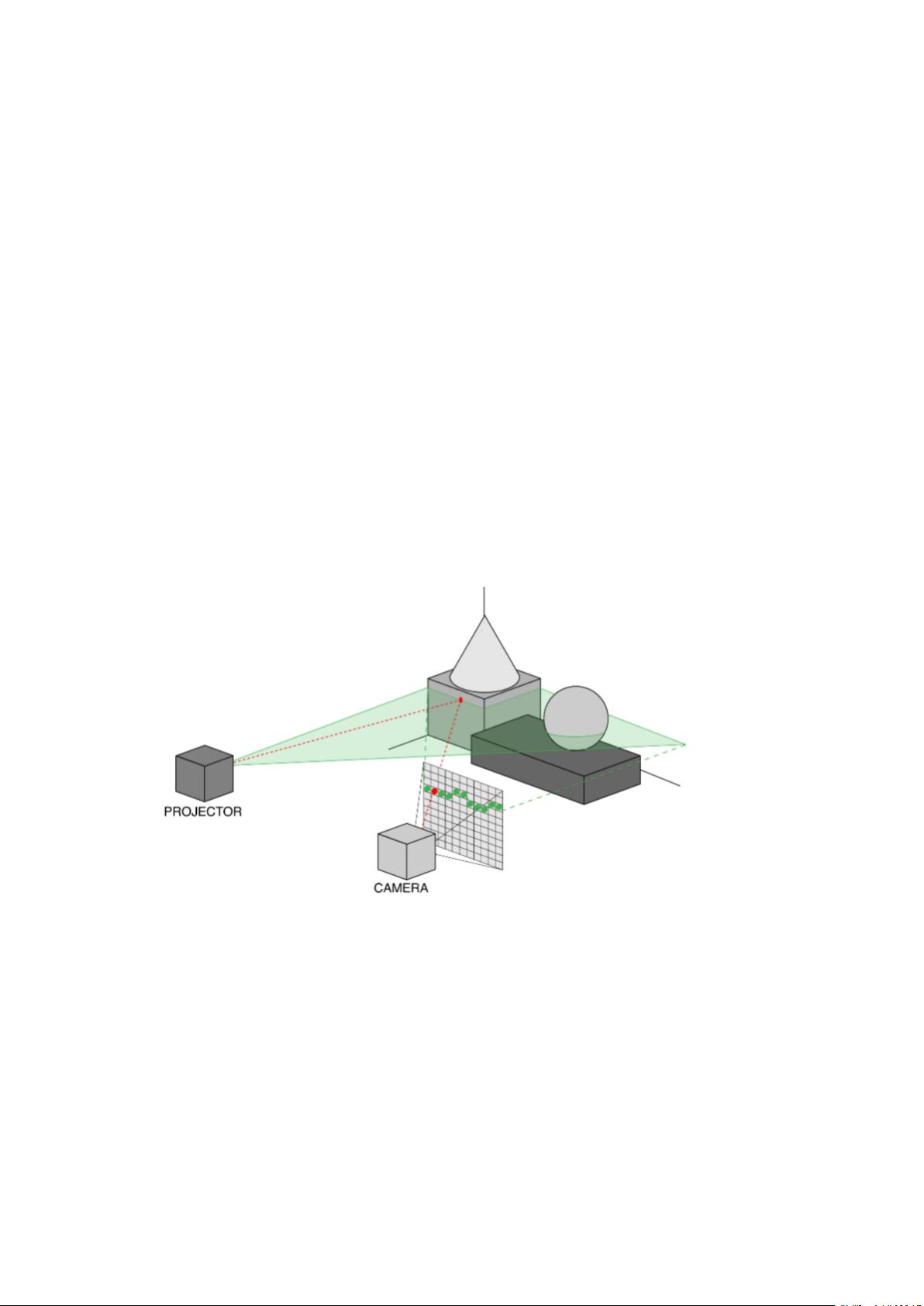
3.2 结构光注入,Projection with structured light
不同于三角测量法,结构光注入需要一个主动发光源,它向场景中的物体照射预定模式的
剩余41页未读,继续阅读
2012-03-01 上传
2021-07-02 上传
2023-07-29 上传
2024-11-02 上传
2024-11-02 上传
2023-05-17 上传
2023-10-28 上传
2023-07-27 上传
2024-10-25 上传

书博教育
- 粉丝: 1
- 资源: 2837
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
