自动控制原理(胡寿松第四版)课后习题解答1-6章
需积分: 27 183 浏览量
更新于2024-07-30
2
收藏 2.69MB PDF 举报
"《自动控制原理》(胡寿松)第四版课后答案1——6章"
本资源提供了胡寿松编著的《自动控制原理》第四版的前六章课后习题解答,涵盖了自动控制领域的基础知识。这些章节讨论了线性系统、非线性系统以及动态模型的建立和分析,对于理解和掌握自动控制系统的工作原理至关重要。
1-3 题涉及到一个液位控制系统的描述,解释了系统如何通过浮球和气动阀门调节流入和流出的液体量,以保持液位平衡。这反映了控制系统的基本工作方式,即通过反馈机制调整输入以维持输出稳定。
1-4 题列举了不同类型的系统,包括非线性系统、非线性时变系统、线性定常系统等,强调了控制系统的分类及其特性。
在第2章中,解题主要涉及机械系统和无源网络的微分方程及传递函数的求解。2-1题通过拉普拉斯变换得到了机械系统的传递函数,展示了如何将物理系统的动力学模型转化为数学表达式。2-2题通过两种方法(直接法和运算阻抗法)求解无源网络的传递函数,体现了多种分析方法在控制理论中的应用。2-5至2-8题进一步深入到系统结构图的绘制和反馈回路的简化,求得系统闭环传递函数,这是分析系统稳定性及动态性能的关键步骤。
第3章的内容涉及系统的动态响应,如最大超调量、无阻尼自然振荡频率、过渡时间和稳定性分析。3-3题计算了二阶系统的超调量,并介绍了无阻尼自振角频率的概念。3-4题讨论了系统的单位阶跃响应,分析了超调量和过渡时间,并研究了比例微分环节如何改善系统性能。3-5至3-7题则通过劳斯稳定性判据来判断系统的稳定性,劳斯表的构造和分析是系统稳定性理论的重要组成部分。
这些习题解答详细地阐述了自动控制原理中的核心概念,包括系统建模、传递函数、稳定性分析和动态性能评估,为学习者提供了宝贵的参考资料。通过这些题目,学生能够巩固对自动控制理论的理解,提高解决实际问题的能力。
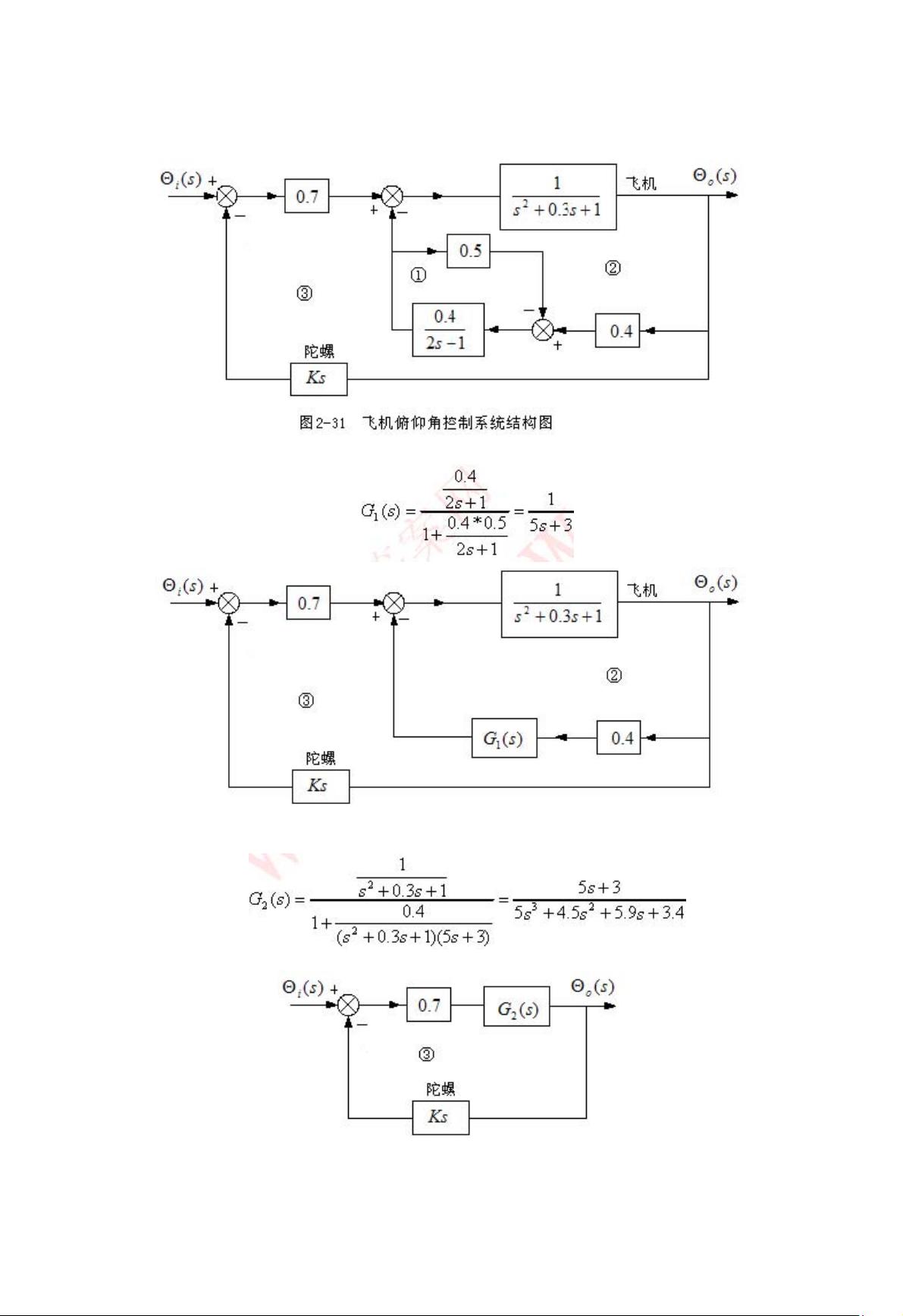
2-8 解:
将①反馈回路简化,其等效传递函数和简化图为:
将②反馈回路简化,其等效传递函
数和简化图为:
剩余24页未读,继续阅读
2021-09-29 上传
172 浏览量
4089 浏览量
271 浏览量
421 浏览量
267 浏览量

Code_Fanatic
- 粉丝: 6
- 资源: 104
 我的内容管理
展开
我的内容管理
展开







最新资源
- nRF905射频芯片文档
- symbian入门教程(创建工程)
- 嵌入式系统C语言编程
- 某某集团员工办公应用软件操作手册.pdf
- AIX_5L_Club_TestReport.doc
- T-SQL资料(很不错)
- 高校医院管理系统需求说明书
- 利用天语A615作为调制解调器让电脑上网操作方法.doc
- CCS2000的使用说明
- Beginning JavaScript with DOM Scripting and Ajax
- 高速缓冲存储器的功能
- zxld1350的英文资料
- 2440datasheet
- ASP.net 中用C#调用Java web service 图解教程
- 计算机组成原理习题答案
- redhat as3下安装oracle 9i
