固高四轴运动控制卡软件系统开发与直流伺服应用
下载需积分: 10 | PDF格式 | 748KB |
更新于2024-09-14
| 63 浏览量 | 举报
"基于VC++的四轴运动控制卡软件系统开发研究"
本文主要探讨了在VC++环境下针对固高AABC<DDC_EFC&'%'运动控制卡的四轴直流伺服系统的软件开发技术。文章作者是高#煊#何广平,来自北方工业大学机电工程学院。
在四轴运动控制卡的应用中,使用了F-G0H3I'((公司的GJ42+0+K1L+HM931G+M'I300'的控制器进行二次开发。二次开发主要是对控制器的功能进行扩展和定制,以满足特定的运动控制需求。通过深入理解FG0H3I'((的GJ42+0+K1L+HMI300'的内部运行机制,可以更有效地编写控制算法和应用程序。
软件开发过程通常包括以下几个关键步骤:需求分析、系统设计、编程实现、测试调试以及系统优化。在本文中,作者详细介绍了如何利用VC++作为开发工具,构建用户界面,处理与硬件交互的底层通信协议,以及设计实时控制算法。VC++作为一个强大的Windows应用开发平台,提供了丰富的库函数和面向对象的编程特性,使得开发者能够高效地实现控制软件的开发。
在编程实例中,作者可能涉及了如何配置控制卡参数,设置四轴电机的运动轨迹,以及如何实现精确的位置、速度和力矩控制。此外,还可能讨论了错误处理机制和实时性能的优化方法,这些都是确保系统稳定性和精度的重要环节。
关键词包括四轴运动控制卡、直流伺服系统、FG0H3I'((控制器和VC++编程。这些关键词涵盖了控制系统硬件、软件开发语言以及具体的控制技术,反映了研究的核心内容。
文章的其余部分可能详细阐述了实际的代码实现细节、实验结果以及系统性能评估。通过对各种运动控制策略的比较和实验验证,展示了所开发的软件系统在四轴运动控制中的优越性能。同时,可能还讨论了未来可能的研究方向,如多轴联动控制、高速高精度控制算法的优化,以及在不同工业应用场景下的适应性。
这篇研究论文为基于VC++的四轴运动控制卡软件系统开发提供了理论基础和实践经验,对于从事相关领域的工程师和技术人员具有很高的参考价值。
!
%[###
!
基于 ’&RR的四轴运动控制卡软件系统开发研究
高
#
煊
#
何广平
!
北方工业大学机电工程学院
"
北京 !’’![[
#
摘
!
要
!
研究了基于固高 ABC<DD CEFC&’%运动控制卡的直流伺服系统
"
利用 FG0H3I’((提供的 "GJ
42+0+K1L+HM931G+M’I300
’
"L’
(
进行二次开发的方法
%
并由 NGM9+80程序内部运行原理入手
"
分
析了软件开发的过程
"
同时给出了编程实例
%
关键词
!
四轴运动控制卡
!
直流伺服系统!FG0H3I’((!"L’
A$%$)/34)"0-$#$:*1>$"&*8B*5/
C
)9’% +*&’*"7*"&/*:7)/0
=*8&C)/$=<%&$> ?)%$0*"D7((
,*N:7/0
"
)6,7/05O.0
’
K8HHD5D8EFDG;/0.G/H/0L 6HDGCI.G/H605.0DDI.05
"
+8IC; K;.0 />0.UDIB.CJ
8E9DG;08H85J
"
WD.e.05!’’![[
"
K)+
(
*/012341
!
9;DC;DB.BBC7L.DBC;DQ/J8E7C.H.d.05F4KOI8U.LDL =J‘.B7/HKRR C8?/XDBDG80L/IJD1OH8.C/C.80
=/BDL 80 /PKBDIU8BJBCD? 8E,9V[’’ VY‘VMK3?8C.80 G80CI8HG/IL
"
/0L /0/HJdDBC;DOI8GDBB8E
B8ECQ/IDD1OH8.C/C.80 BC/IC.05Q.C; C;D.0CDI.8II700 .0 5OI.0G.OHD8E@.0L8QBOI8GDL7ID
"
?D/0Q;.HDOIDBS
D0CBC;DOI85I/??DD1/?OHDT
5678+290! 487IV/1.BF8C.80 K80 CI8HK/IL) PKYDIU8YJBCD?) ‘.B7/HKRR) F4K
在自动控制领域
$
基于 MK和运动控制卡的伺服
系统正演绎着一场工业自动化的革命
#
目前
$
常用的
多轴控制系统主要分为
"
大块
,
基于 M-K的多轴定位
控制系统
$
基于 MKh=/BDL 的多轴控制系统和基于总线
的多轴控制系统
#
由于 MK机在各种工业现场的广泛
应用
$
先进控制理论和 PYM技术实现手段的并行发
展
$
各种工业设备的研制和改造中急需一个运动控制
模块的硬件平台
$
以及为了满足新型数控系统的标准
化
"
柔性化
"
开放性等要求
$
使得基于 MK和运动控制
卡的伺服系统备受青睐
#
本文主要是利用 ‘.B7/HKR
R$c’ 提供的 F4K应用程序开发平台探索研究平面
%-
PN4四分之过驱动并联机构的运动控制系统的软
件开发
#
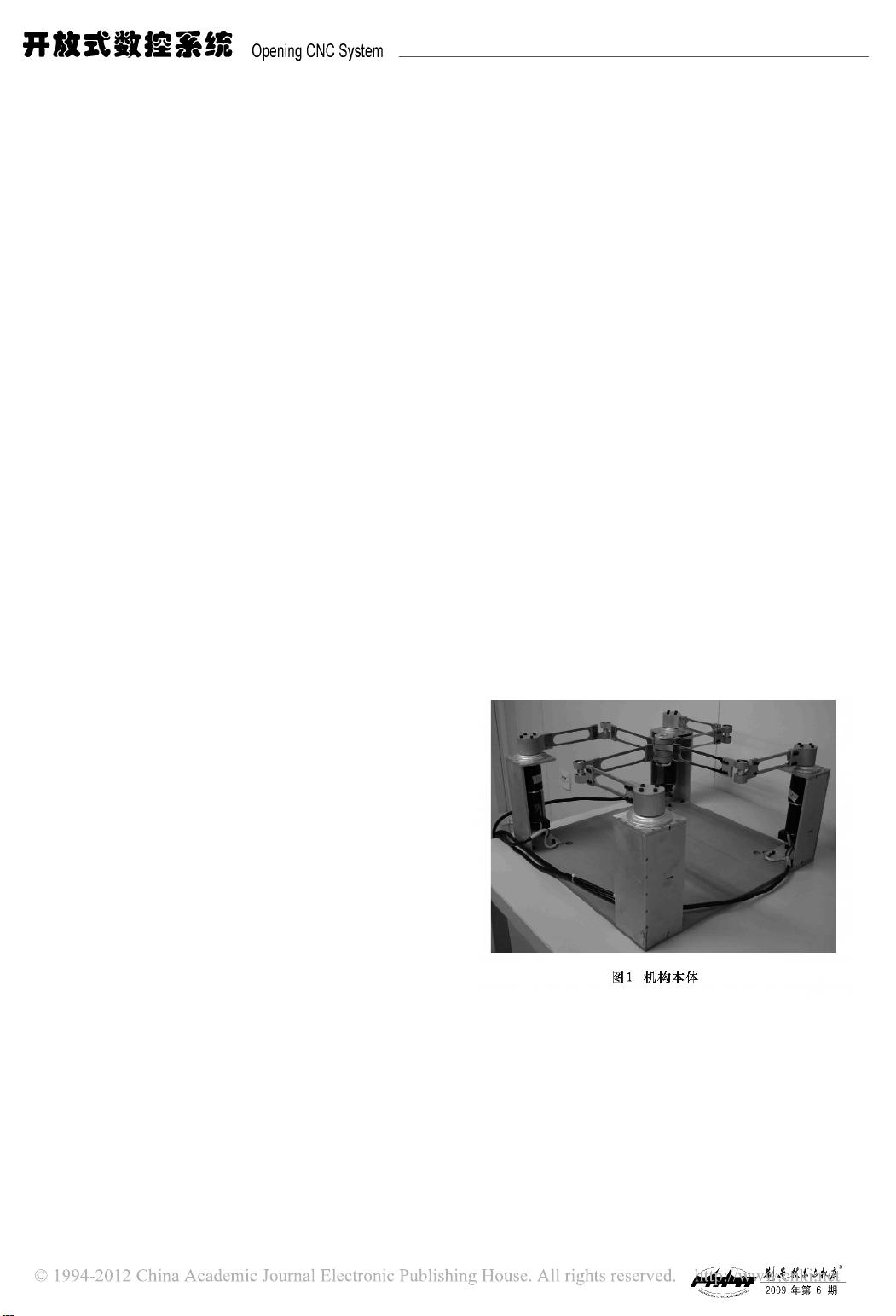
:!平面 ..-.B四分之过驱动并联机构的控
制系统组成
并联机构的本体如图
!$
该机构由
[
个分支链组
成
$
每条支链的一端与驱动电动机相连
$
而另一端相交
于同一点
#
该并联机构的操作末端有
%
个自由度
)
即
!
方向和
"
方向的平动*$驱动输入数目为
[$
从而组
成过驱动并联机构
#
控制系统的硬件主要由
[
部分组成
,
MK机
$
四轴
运动控制卡
$
伺服驱动器和直流电动机
#
系统选用的
是普通
MK机
$
固高公司的 ,9V[’’ VY‘VMK3运动控
制卡
$
瑞士 F/180 公司的四象限直流伺服驱动器及直
流永 磁 电 动 机
#
伺 服 驱 动 器 型 号 为 [ Vf VPK
*PY\’ ]\
$
与驱动器适配直流电动机型号为 F/180 b6
V"\
#
运动控制系统的构成如图
%
所示
#
上位控制单
元由 MK机和运动控制卡一起组成
$
板卡插在 MK机主
板上的
MK3插槽内
#
MK机主要负责信息流和数据流
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐




syh002008
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
