光电稳瞄伺服系统建模与仿真研究:粗跟踪控制补偿精度提升。
版权申诉
135 浏览量
更新于2024-02-25
收藏 1.1MB DOC 举报
As free space optical communication continues to advance, the demand for higher performance indicators in optical communication has increased. Aviation reconnaissance platforms are playing an increasingly prominent role in this field. These platforms significantly reduce the impact of atmospheric conditions on the performance indicators of space optical communication, making them a crucial hub for free space optical communication links.
This document focuses on the electrical control design of a multi-frame optical platform used in coarse tracking processes. It analyzes and designs the servo stability loop, open-loop pointing loop, and dynamic tracking loop in the coarse tracking process. The selection of hardware components, control compensation, system simulation, and virtual experiments are also discussed. The experimental research on the theories and methods proposed in this document has produced results consistent with simulation and theoretical analysis, validating the correctness of the theoretical analysis.
Keywords: coarse tracking, two-axis four-frame servo control, compensation, precision.
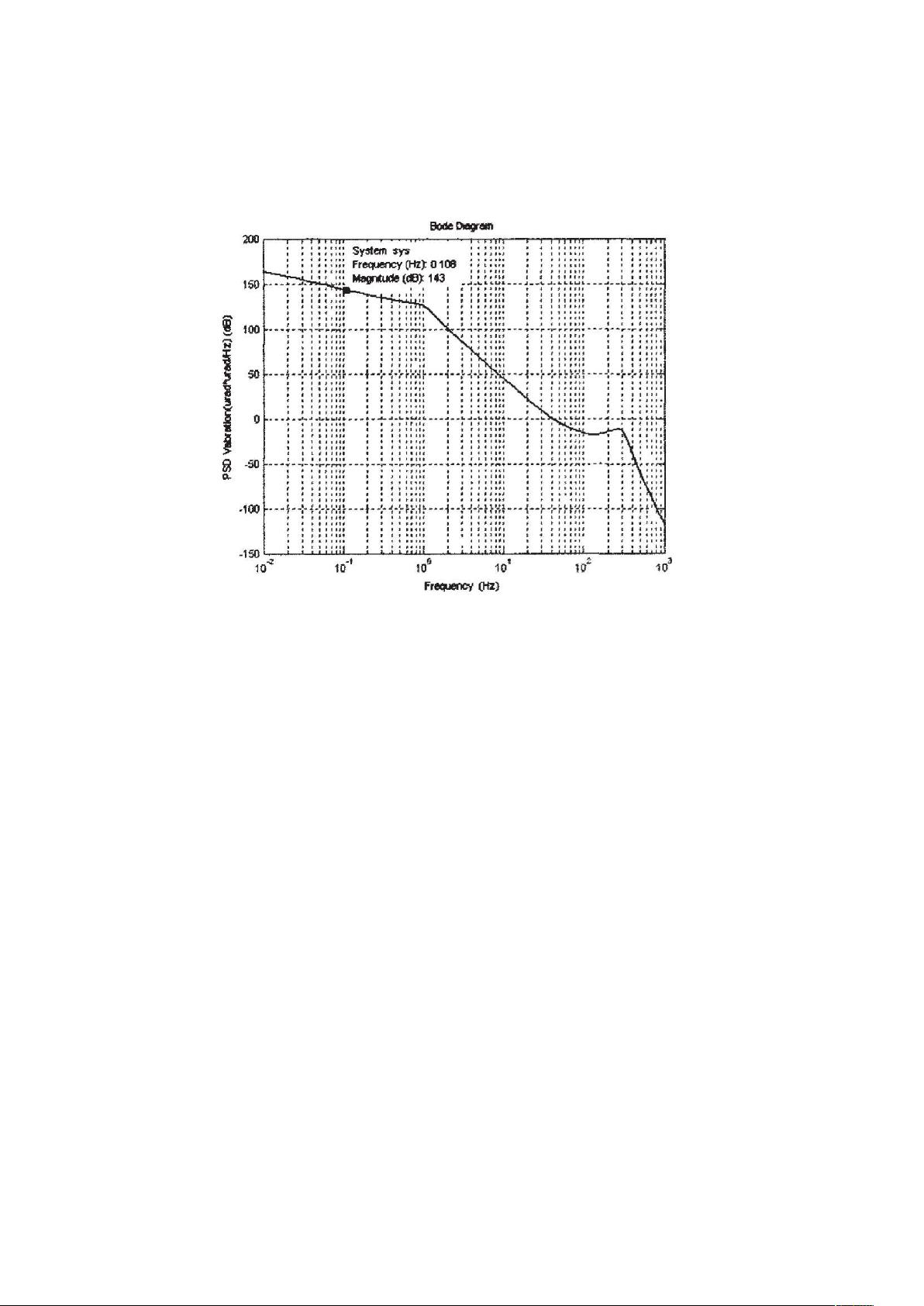
J s(f)df '14mrad .而对于卫星平台,从
OLIMPULST通信振动测试卫星的功率谱计算
的振动方差仅为40urad。这
就决定了航天激光通信系统和航空激光通信系统的一个重要医别就
是
必须釆取必要的措施来抑制飞机平台的振动和扰动。本系统釆用陀
螺主
动抑振和被动减振两种措施对飞机平台的振动进行有效抑制。抑制
振动 的最主要目的是实现视轴稳定功能,达到视轴稳定精度。
2.1.2提高开环指向精度,减小捕获不确定区域
在通信幵始以甜,由于GPS/INS所给出了位置和姿态,它们的
指向
m 2.1美国无人机振动功率谱密度
可以表达为:权


剩余73页未读,继续阅读
406 浏览量
2024-11-10 上传
2024-11-02 上传
207 浏览量
2024-11-02 上传
234 浏览量
2024-11-10 上传
306 浏览量
237 浏览量

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
